A basic workflow to program a robot in GO2CAM is as such:
机器人模块
机器人界面可能看起来与MTE环境相似,但它是独立的模块。 如果购买了该软件包,则可从主页访问;机器人文件只能在此模块中打开。 |
|
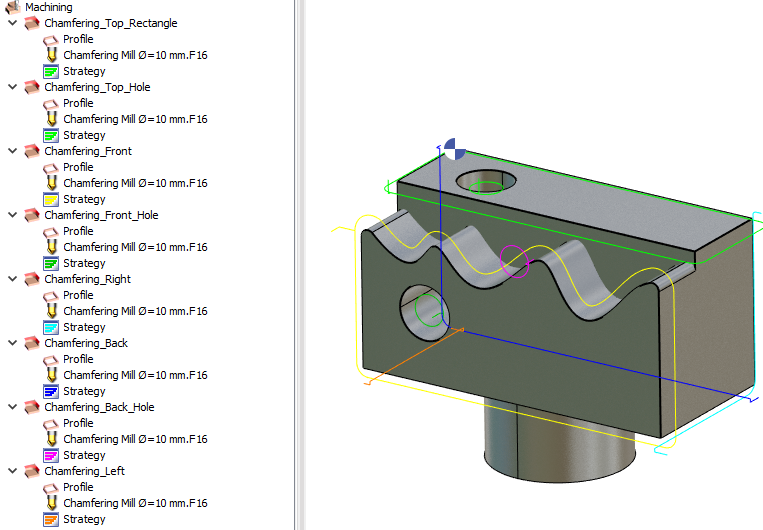
零件的CAM编程此过程部分与加工中心模块中的编程类似。 导入零件。 定义循环;几何选择、刀具选择和循环选择,一如既往。 机器人被视为铣床,因此任何铣削循环都可以用于机器人加工,从标准、3轴到高级5轴。 计算并模拟刀具运动。 在几何选择过程中可以定义多个进刀和退刀点,以手动控制刀具与零件的进刀和退刀刀具路径。 |
|
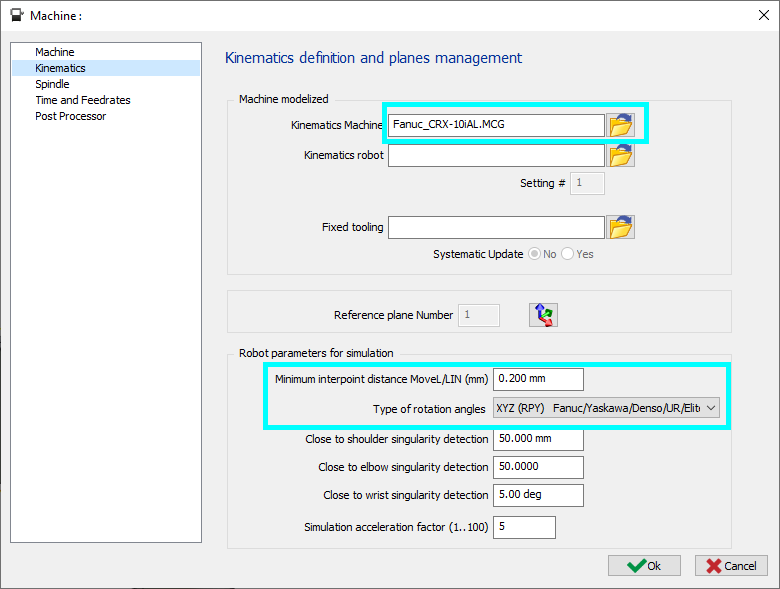
机器人配置机器人运动学 一旦创建并计算了一个或多个循环无误,选择一个机器人来驱动选定的刀具执行加工循环。 在加工树中右键单击“机床”,然后选择“编辑”。将打开机床对话框。 为运动学机床选择一个机器人.MCG文件,定义参数,然后单击“确定”进行验证。 如果要定义机器人单元,则需要设置2个.MCG文件。运动学机器人应为独立机器人,而运动学机床可以是单元的其他部分。在这种情况下,无法手动移动机器人的轴位置。 建议只使用一个MCG以完全访问机器人的所有组件。 最小点间距离 MoveL/LIN (mm) : 这是机器人程序生成线性运动的最小距离,这对于曲线路径很有用,无需高精度,通过减少点数可以加快路径运动(模拟不受此参数影响)。 该 旋转角度类型 可以根据所使用的机器人品牌进行设置。 阈值 值可以为 奇点检测 设置肩部、肘部和腕部关节。 可以通过转到“机床”菜单并选择“刀具”子菜单来可视化机器人与零件。 可以通过在中单击机器人名称来隐藏机器人。这在零件被机器人本体隐藏的情况下很有用。 有关刀具和零件设置的附加参数的详细信息,请 单击此链接 . |
|
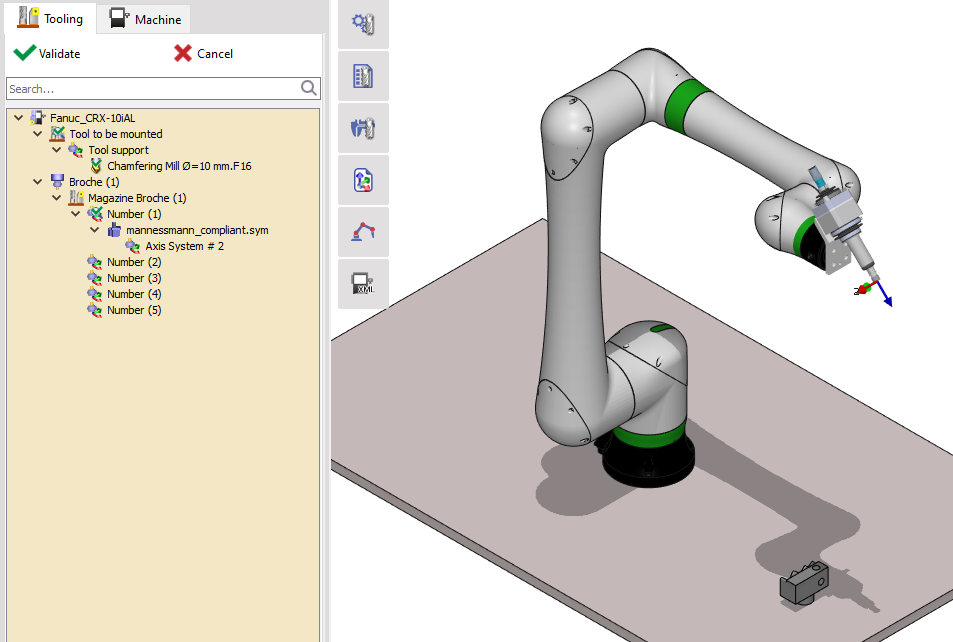
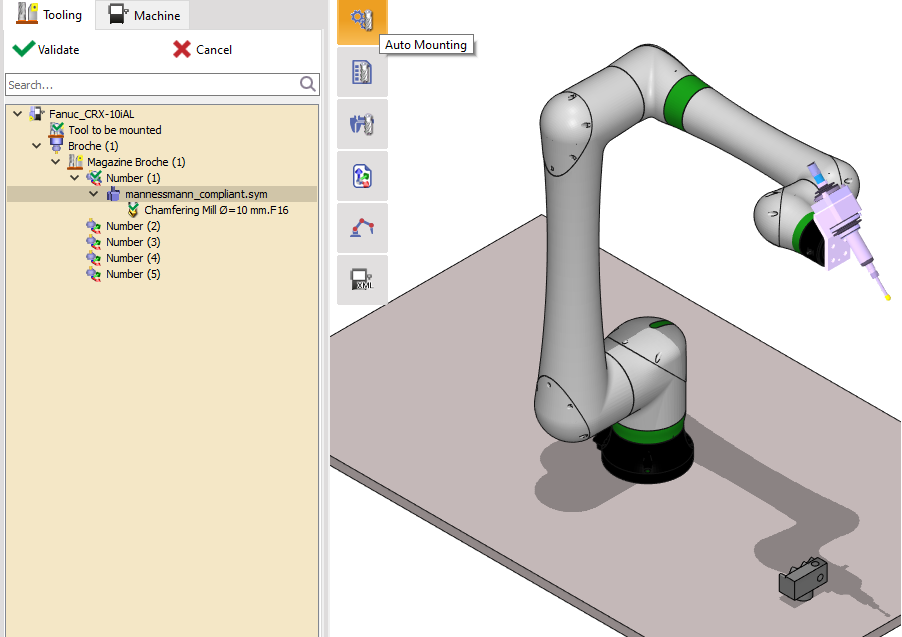
刀具和零件配置加载刀具和刀架的过程与MTE类似。 单击“自动装配”将刀具装配到机器人上。 右键单击刀具或机器人末端轴以插入刀架。 刀具可以在“刀具”选项卡中进一步配置,零件可以在“机床”选项卡中重新定位。
|
|
|
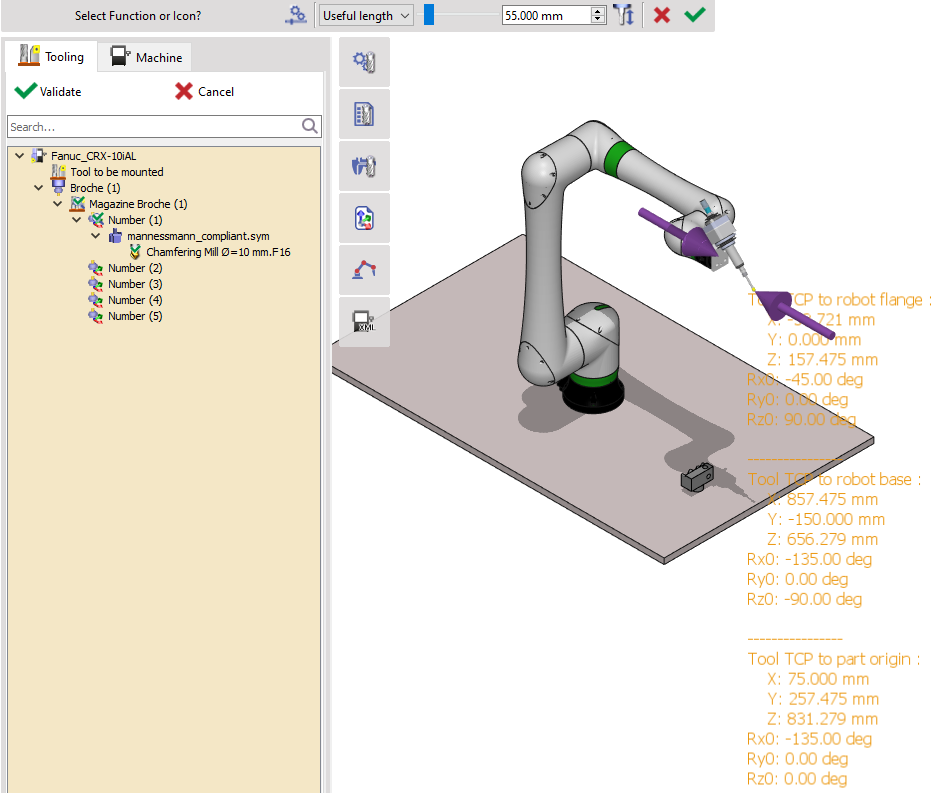
刀具 通过双击树或程序窗口中的刀具,将显示相对于机器人法兰的刀具中心点(TCP),您还可以修改刀具的有效长度。
TCP以X、Y、Z、Rx0、Ry0、Rz0表示。
|
|
|
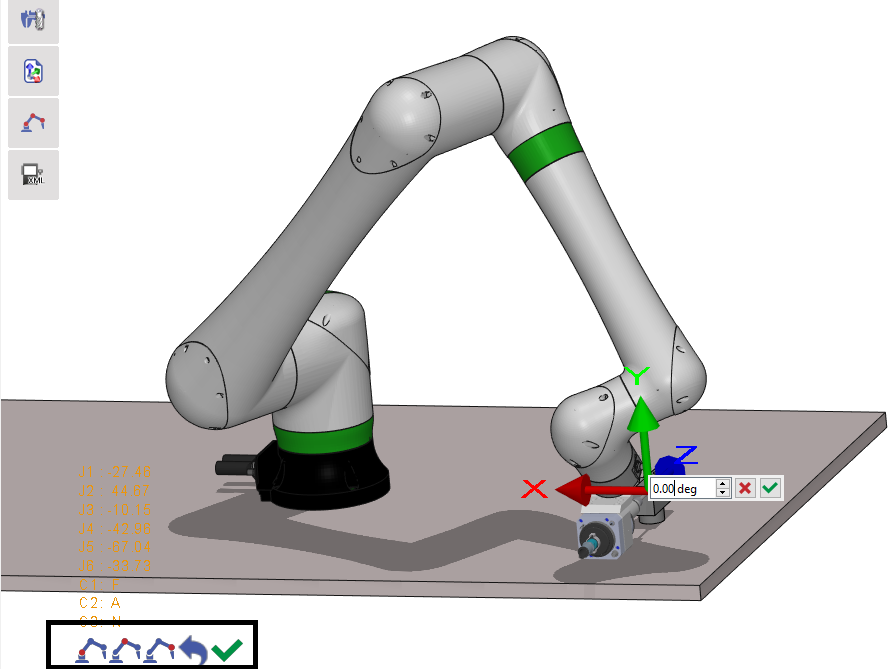
零件可达性 最初,零件的位置可能离机器人太近或太远。可以估计机器人零件的可达性。在 刀具 选项卡中,双击零件上的一个点,如果该点可达,机器人将移动到其工具或其法兰点垂直于该点接触该点,否则将显示消息。 要显示刀具坐标系并移动刀具,请双击机器人并单击刀具选择刀具(一个机器人可能同时有多个刀具)。 使用左下角的三个图标更改机器人配置,同时保持相同的刀具位置。 还可以通过单击并拖动轴箭头进行平移和旋转来移动坐标系,或通过右键单击轴来指定平移或旋转值。 |
|
|
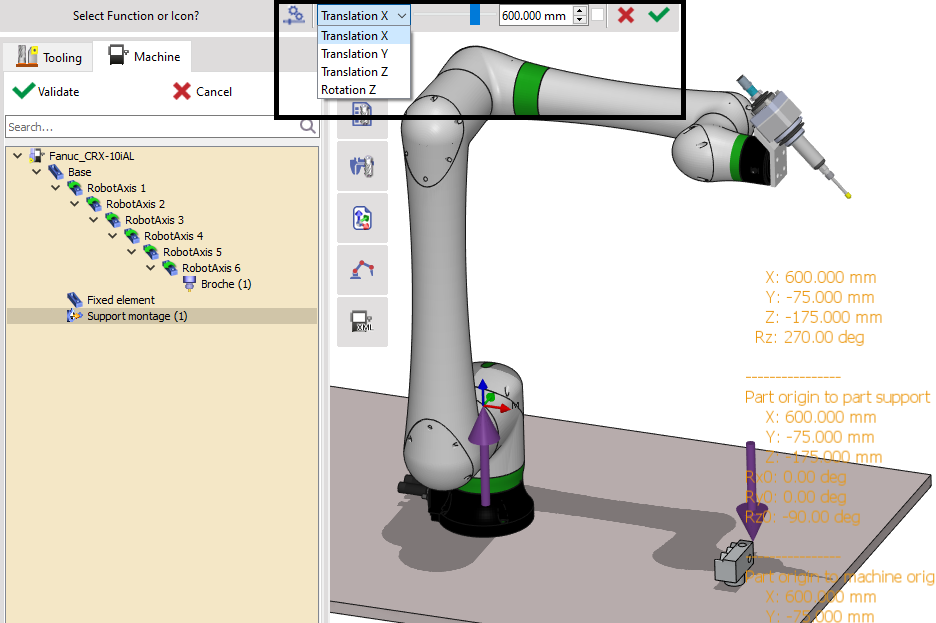
零件重新定位 零件可以相对于机器人重新定位。 切换到“机床”选项卡,双击工作装配件支架(在此示例中重命名为“支架装配”)。零件的笛卡尔位置将在机器人的基坐标系中可见。 使用功能条上的功能沿X、Y、Z方向和平移以及仅绕Z轴旋转来重新定位零件。 验证修改。
|
|
|
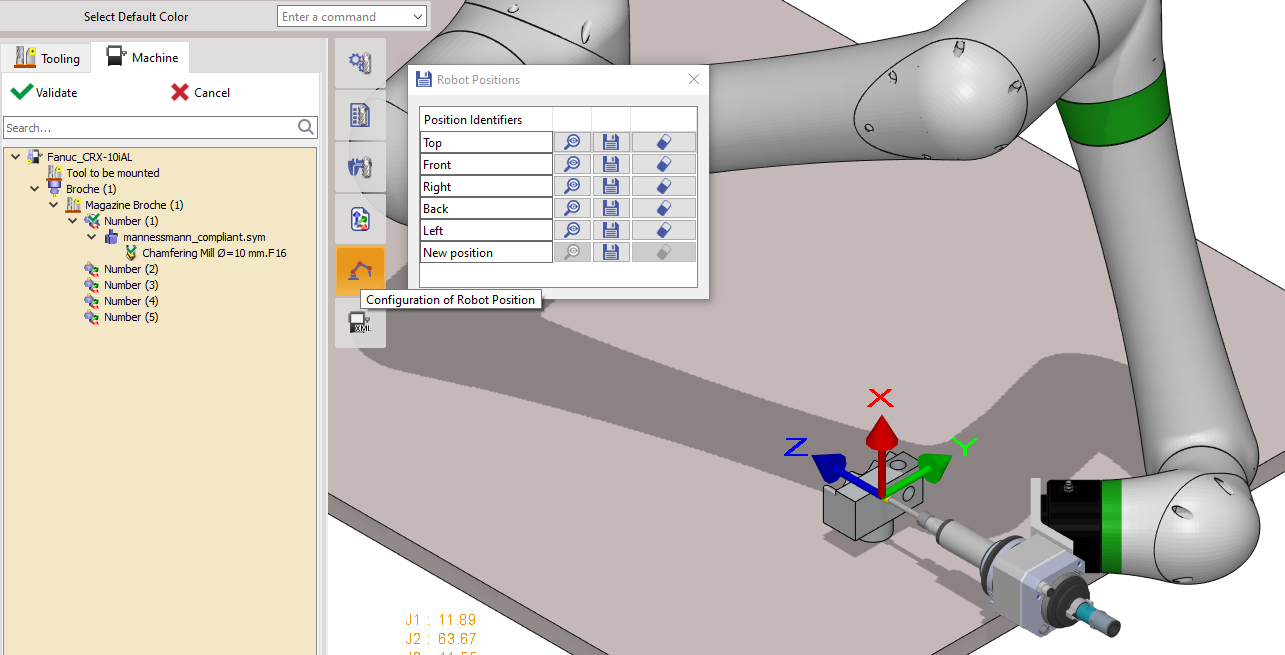
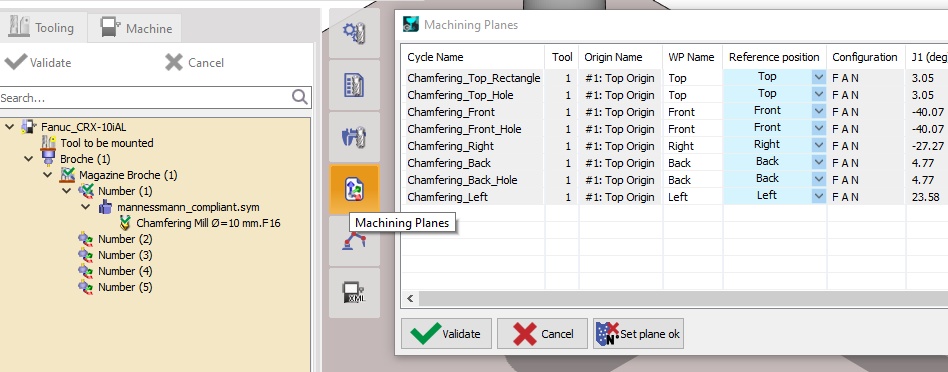
每个循环的参考位置 由于通过笛卡尔点定位机器人是冗余的,一个平面上一个循环的配置或方向可能不适合另一个平面上的另一个循环,最好为每个循环定义一个参考位置。 事实上,要生成每个循环的关节位置路径,需要一个参考位置。在整个循环路径中,保持参考位置的相同配置并参考方向。 如果您想了解更多信息,请单击此处: 机器人参考位置创建 . 要添加新的或修改现有的参考位置,请单击左侧工具栏上的“机器人位置配置”命令。 将机器人定位到基于平面的一个面上。 通过拖动刀具TCP轴来更改方向,以获得机器人在此面上的合适定位。 使用相应平面的保存图标保存配置。 创建并保存所有必要的参考位置后,需要将它们与定义的循环关联。为此,打开“加工平面”命令,并为每个循环分配参考位置。 如果未为循环分配参考位置,则将采用前一个循环的最后一个。如果第一个循环的参考位置未关联,则采用运动学文件(.MCG)中定义的起始机器人关节位置。 结果是,如果没有循环被分配参考位置,将应用第一个循环的起始机器人关节位置。 |
|
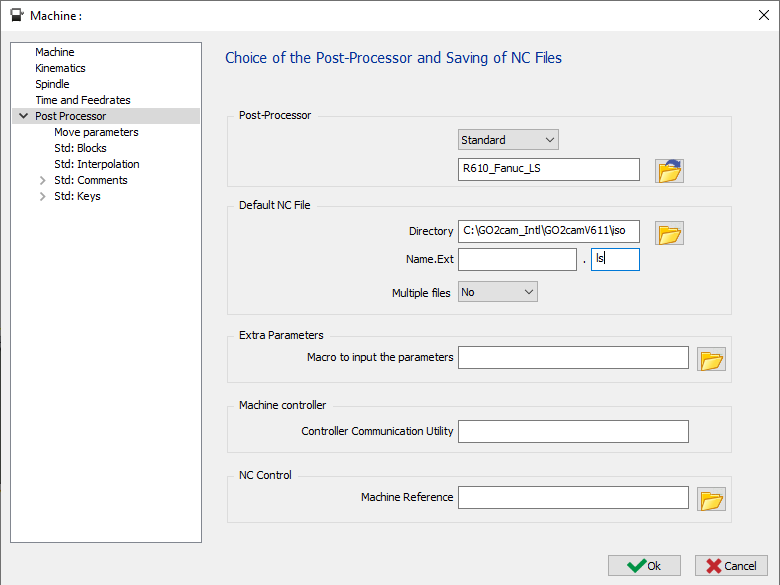
后处理器选择与MTE类似,对于机器人仿真和程序生成,需要选择一个后处理器。 在加工树中,再次打开“机床”窗口并转到“后处理器”菜单。 将PP类型保持为“标准”,然后选择正确的PP用于机器人。在这种情况下,它是FANUC机器人,因此选择了R610_Fanuc_LS。 如果需要,还可以指定输出程序名称(名称.EXT)和扩展名。 |
|
机器人策略设置在模拟刀具路径之前,我们需要设置机器人策略,以便将刀具路径转换为机器人运动路径。 点击这里: 机器人策略设置 |
|
模拟定义了加工循环、选择了机器人、配置了刀具和零件以及选择了后处理器后,就可以在“控制”菜单中启动机器人仿真。 此时,参数和仿真环境与MTE相同。 |
|
碰撞避免如果没有要去除的显著材料,建议将毛坯设置为与零件相同的几何形状。为此,复制零件并将其指定为毛坯。 运行仿真 碰撞检查已启用 . 检查此处可用的各种选项以避免碰撞: 碰撞避免 . |
|
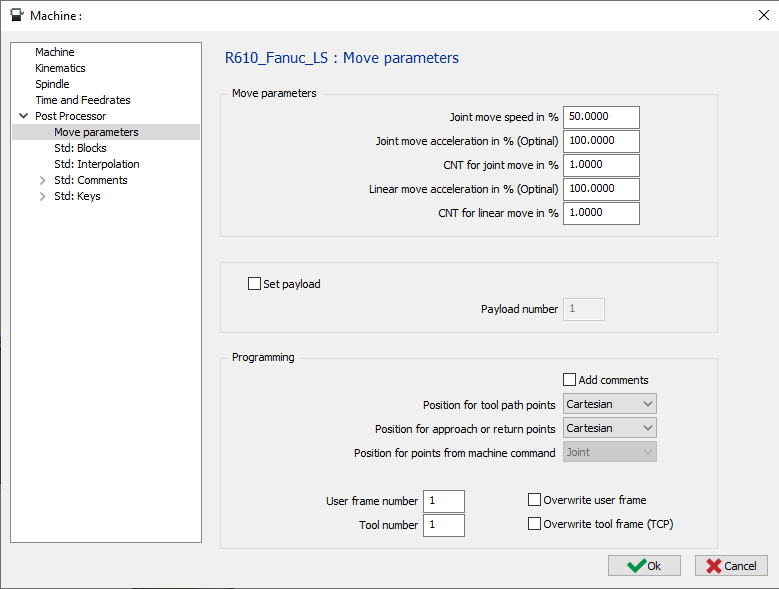
机器人程序输出机器人程序参数设置 在生成机器人程序之前,需要指定几个参数。可以在“机床参数”窗口的“后处理器”下的“移动参数”子菜单中配置关节移动速度(%)、关节移动加速度(可选)、关节移动的CNT(%)、线性移动加速度(%)(可选)、线性移动的CNT(%)。可以设置负载,并且可以在笛卡尔和关节之间选择刀具路径和进刀/退刀点的定位。 |
|
|
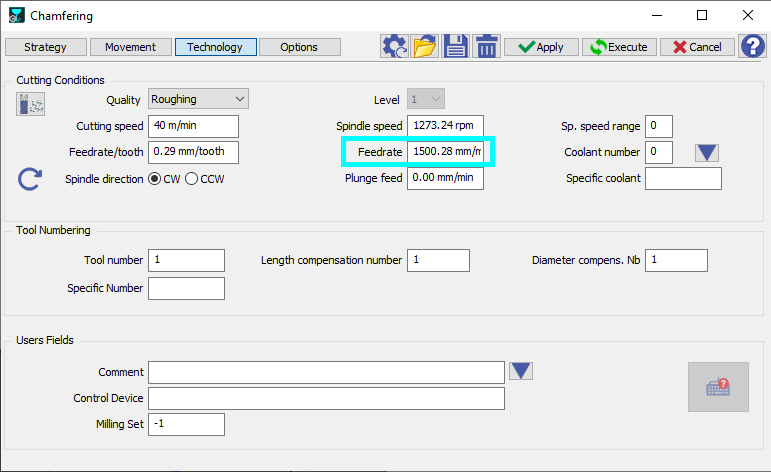
机器人线性速度设置 每个循环的线性速度可以在“技术”选项卡下的每个循环策略中访问和修改。 技术 该 进给 参数(以 毫米/分钟 为单位)控制机器人的线性速度。 任何修改都应通过单击 执行 来应用,以验证更改。 |
|
|
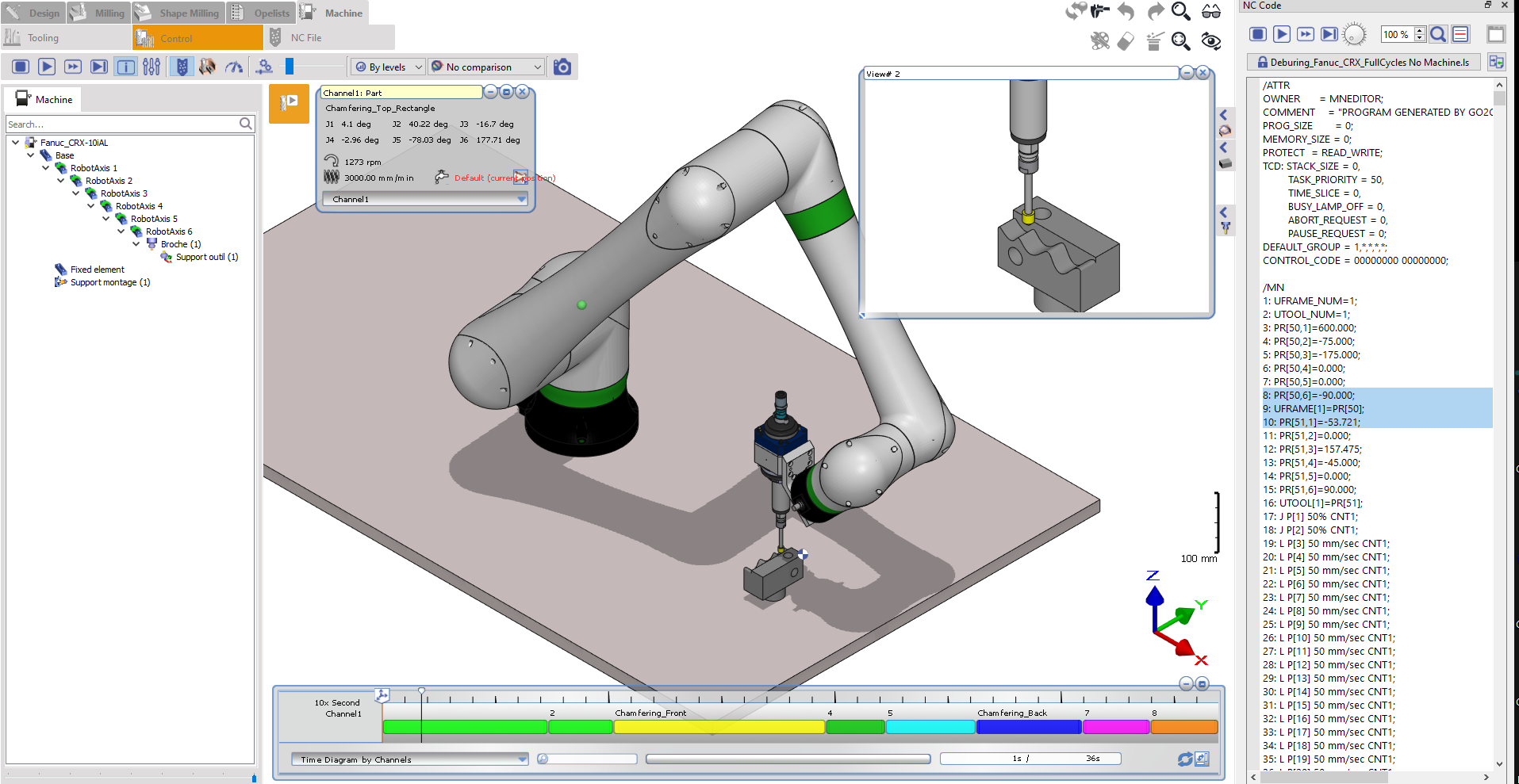
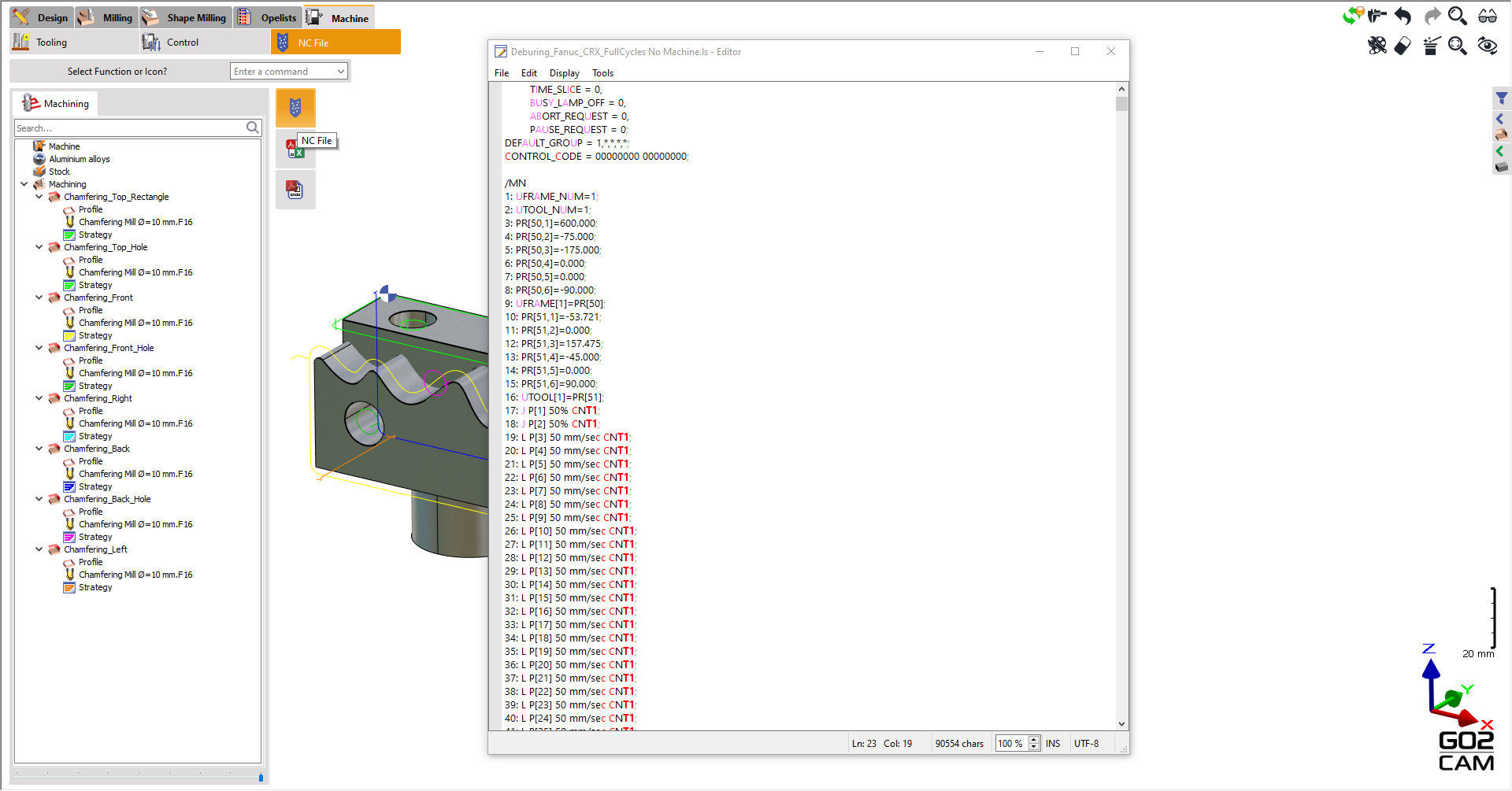
NC输出 通过单击“NC文件”子菜单中的“NC文件”命令来生成NC代码。 |
|
|
观看右侧演示工作流程的视频。
|
|

机器人控制器
|
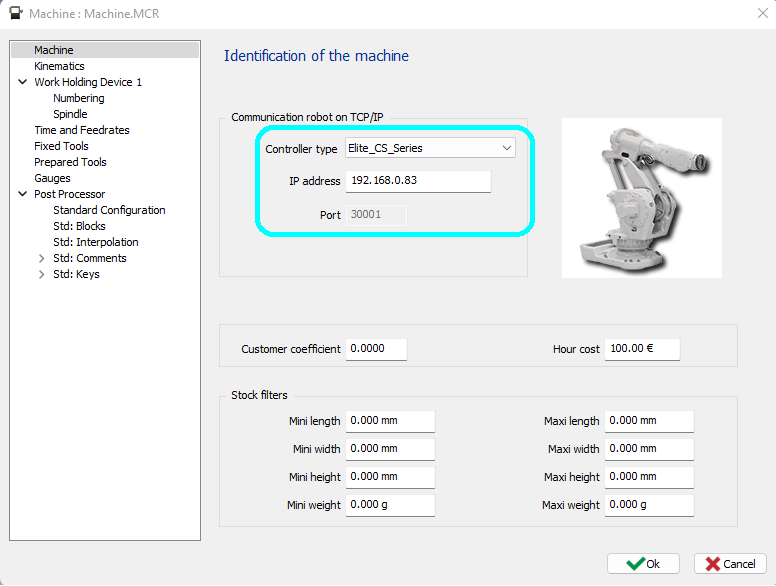
机器人控制器连接设置 然后可以在机器人模拟器或实际机器人上执行输出程序。建议在模拟器中运行程序以进行验证。 对于多个机器人,可以通过IP/TCP或模拟器连接到机器人控制器,并在程序运行时同步机器人运动。为此,请转到“机床设置”窗口,选择机器人控制器类型,输入IP地址和端口号。 右侧是一个示例。 |
|
|
在GO2CAM中同步机器人程序运行 如果实际机器人或其模拟器正在运行程序,则可以在GO2CAM中实时同步实际位置(并非所有机器人当前都支持)。要开始同步,请转到“刀具”,然后选择左下角的“开始同步”图标。 确保选择了正确的刀具以绘制正确的刀具路径。根据控制器,我们甚至可以获得机器人TCP线性速度和点索引。 |
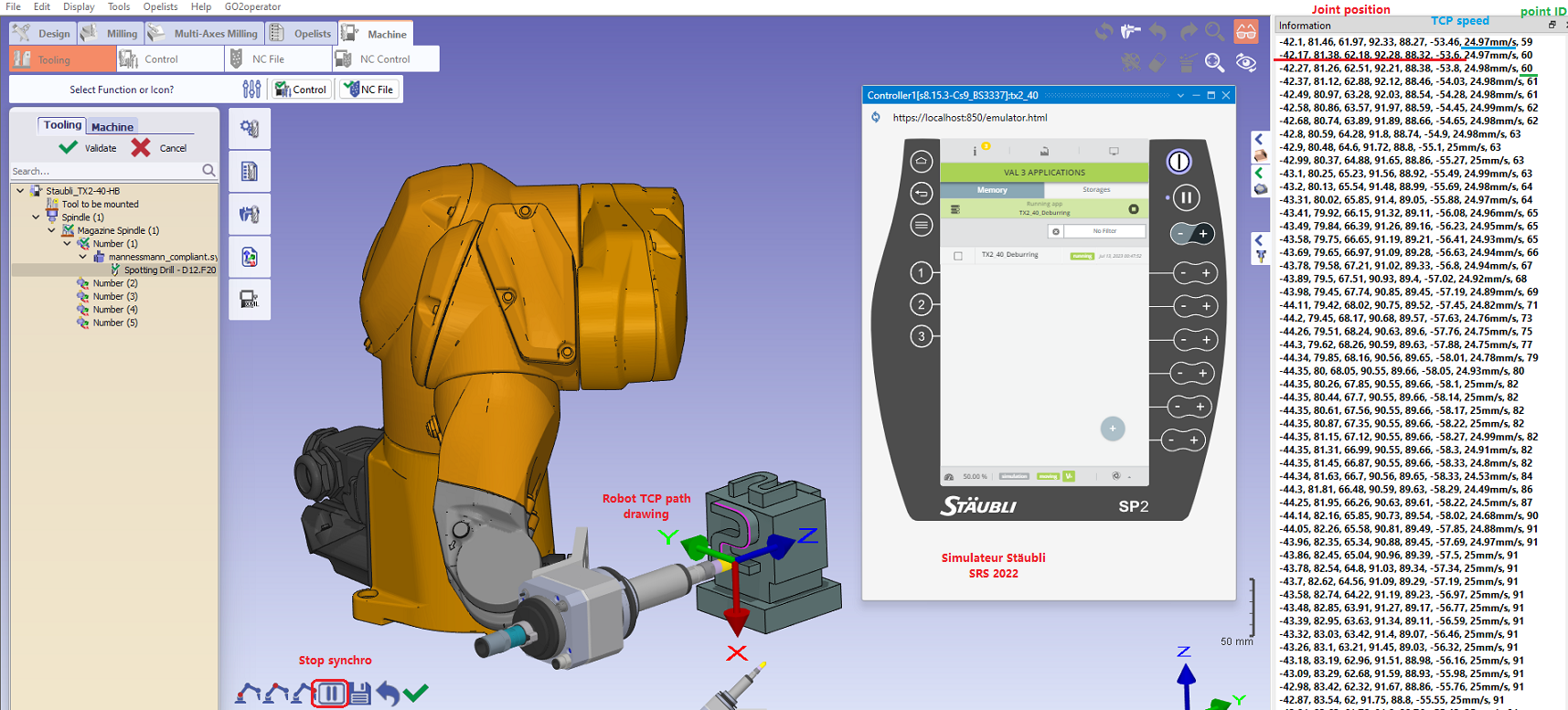
|