本页旨在捕获 GO2CAM for Robot 的刀具选项卡和仿真选项卡中使用的参数。这些参数可通过“机床”->“运动链”访问。
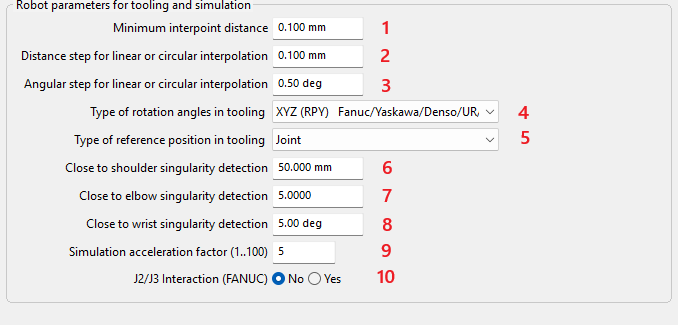
最小点间距离 (1)
对于 MTE 仿真和 CN 文件输出,任何后续点如果距离小于此值,将被忽略。最小值为 0.001 毫米。
此参数可用于过滤 CN 文件中非常接近的机器人路径点,从而使机器人路径更平滑,但可能会降低路径精度。
直线或圆弧插补的距离步长 (2)
此参数可用于减少大型刀具路径的计算时间,或对 NC 文件输出进行路径离散化(如果 PP 中启用了直线运动路径离散化)。最小值为 0.1 毫米。
直线或圆弧插补的角度步长 (3)
此参数可用于减少大型刀具路径的计算时间,或对 NC 文件输出进行路径离散化(如果 PP 中启用了直线运动路径离散化)。最小值为 1 度。
刀具中的旋转角度类型 (4)
此参数定义了不同机器人控制器使用的旋转角度约定。它应用于 TCP 坐标系和用户坐标系的刀具设置中。
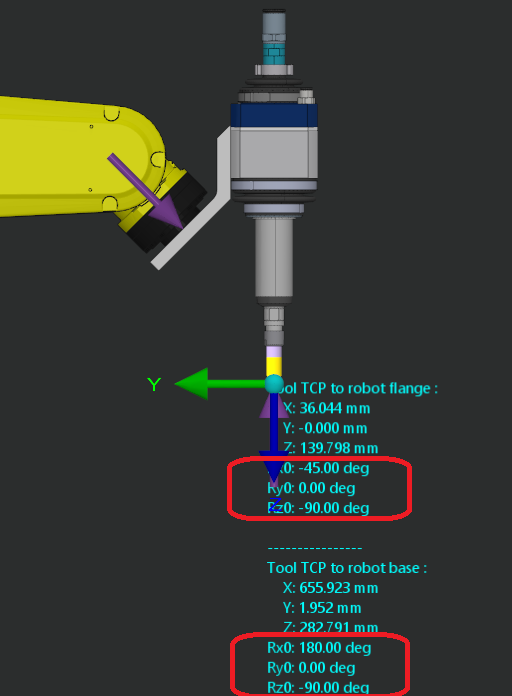
刀具中的参考位置类型 (5)
参考位置可定义为关节(绝对,机器人特定)或笛卡尔(相对于零件原点,可转移到其他机器人型号)。现有的参考位置可以被重新保存以更改其类型。
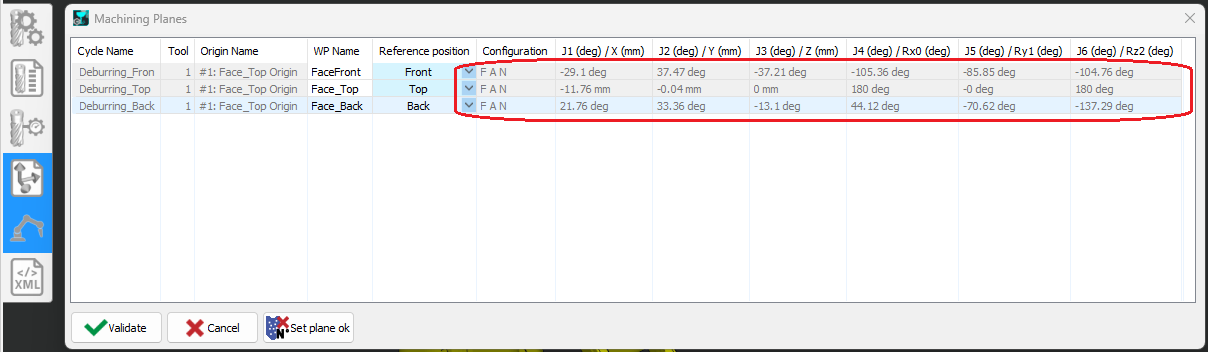
如果零件在机器人路径生成过程中可能会移动(例如,使用额外的定位器),则建议使用关节类型的参考位置,以防止歧义。
接近肘部奇点检测 (6)
肩部奇点检测阈值。此参数有助于确保与机器人奇点的最小距离。
接近肘部奇点检测 (7)
肘部奇点检测阈值。此参数有助于确保与机器人奇点的最小距离。
接近腕部奇点检测 (8)
腕部奇点检测阈值。此参数有助于确保与机器人奇点的最小距离。
仿真加速因子 (9)
用于加速 MTE 仿真的插值点的重采样因子(适用于大型刀具路径)。可能会降低仿真和碰撞检测的精度。对 CN 输出无影响。
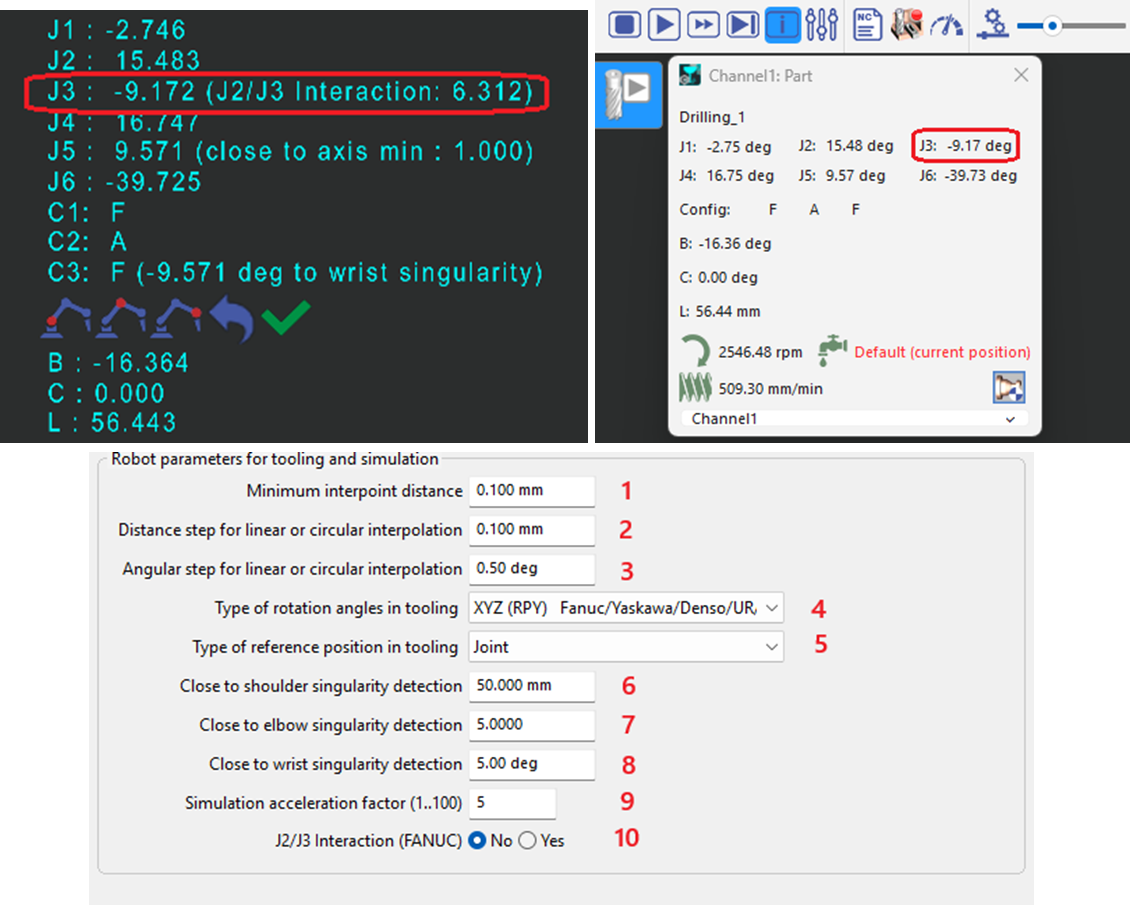
J2/J3 交互 (10)
启用此选项可匹配 TP 上显示的 J3 的关节角度(当 J2 和 J3 耦合时,如 Fanuc 机器人系列)。此选项适用于刀具设置和 MTE 仿真中的机器人关节角度坐标显示,以及机床参数中的关节角度限制。