本頁面旨在擷取 GO2CAM 中用於機械手臂的刀具選項卡和模擬選項卡中的參數。這些參數可透過「機台」->「運動鏈」存取。
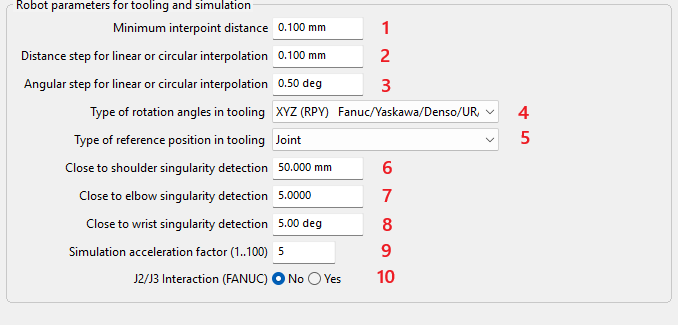
點間最小距離 (1)
對於 MTE 模擬和 CN 檔案輸出,任何後續點若距離此參數值小於此距離,將被忽略。最小值為 0.001 mm。
此參數可用於過濾 CN 檔案中彼此非常接近的機械手臂路徑點,從而產生更平順的機械手臂路徑,但路徑精確度可能會降低。
線性或圓形插補的距離步長 (2)
此參數可用於減少大型刀具路徑的計算時間,或對 NC 檔案輸出進行路徑離散化(如果 PP 中啟用了線性運動路徑離散化)。最小值為 0.1 mm。
線性或圓形插補的角度步長 (3)
此參數可用於減少大型刀具路徑的計算時間,或對 NC 檔案輸出進行路徑離散化(如果 PP 中啟用了線性運動路徑離散化)。最小值為 1 度。
刀具設定中的旋轉角度類型 (4)
此參數定義不同機械手臂控制器使用的旋轉角度約定。它應用於刀具設定中的 TCP 框架和使用者框架。
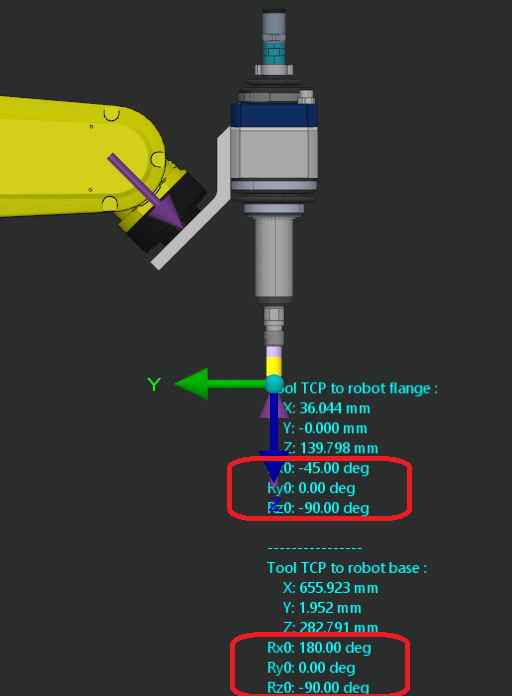
刀具設定中的參考點類型 (5)
參考點可定義為關節(絕對、機械手臂專用)或笛卡爾座標(相對於零件原點,可轉移到其他機械手臂型號)。現有的參考點可重新儲存以更改其類型。

如果零件在機械手臂路徑生成過程中可能會移動(例如,使用額外的定位器),建議使用關節類型的參考點以防止歧義。
肘部奇異點檢測閾值 (6)
肩部奇異點檢測閾值。此參數有助於確保與機械手臂奇異點的最小距離。
肘部奇異點檢測閾值 (7)
肘部奇異點檢測閾值。此參數有助於確保與機械手臂奇異點的最小距離。
腕部奇異點檢測閾值 (8)
腕部奇異點檢測閾值。此參數有助於確保與機械手臂奇異點的最小距離。
模擬加速因子 (9)
用於加速 MTE 模擬的插補點重取樣因子(適用於大型刀具路徑)。可能會降低模擬和碰撞檢測的精確度。對 CN 輸出無影響。
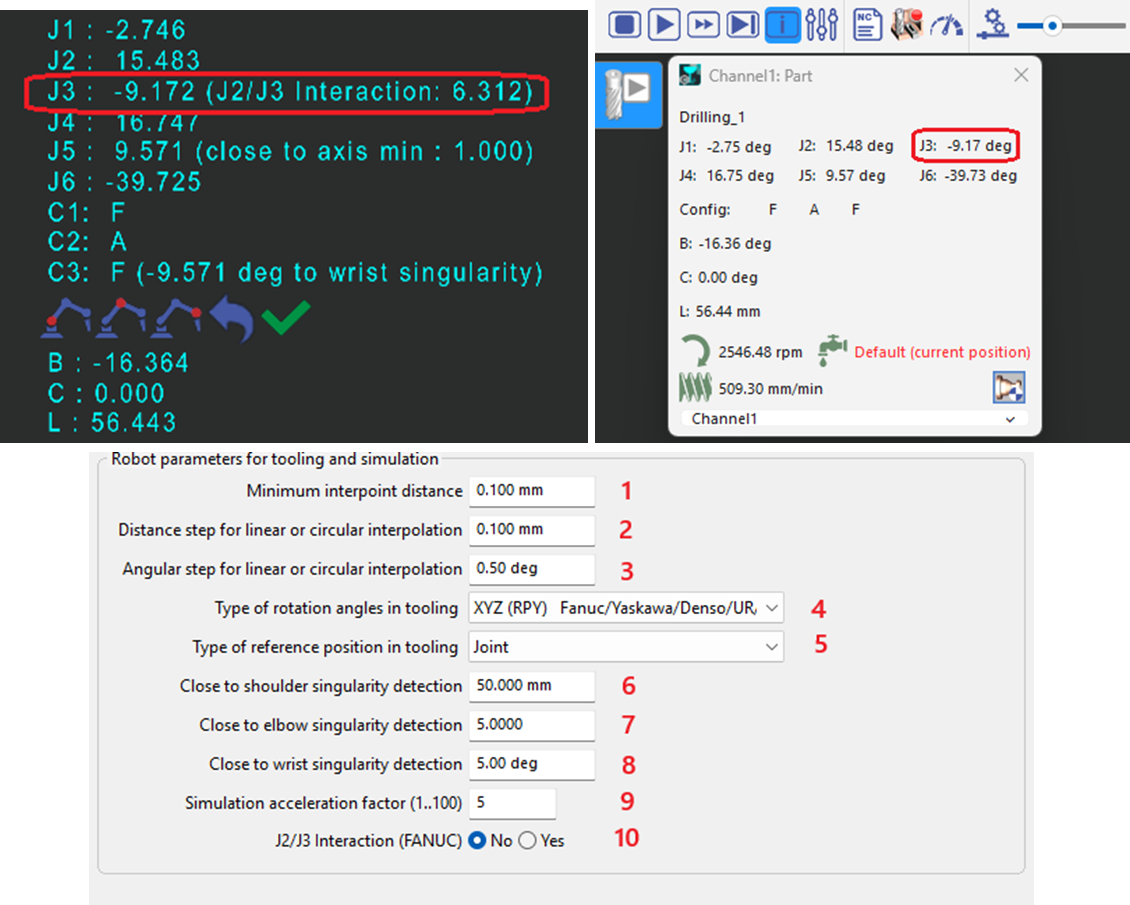
J2/J3 互動 (10)
啟用此選項可匹配 TP 上顯示的 J3 角度(當 J2 和 J3 耦合時,例如在 Fanuc 機械手臂系列中)。此選項適用於刀具設定和 MTE 模擬中的機械手臂關節角度座標顯示,以及機台參數中的關節角度限制。