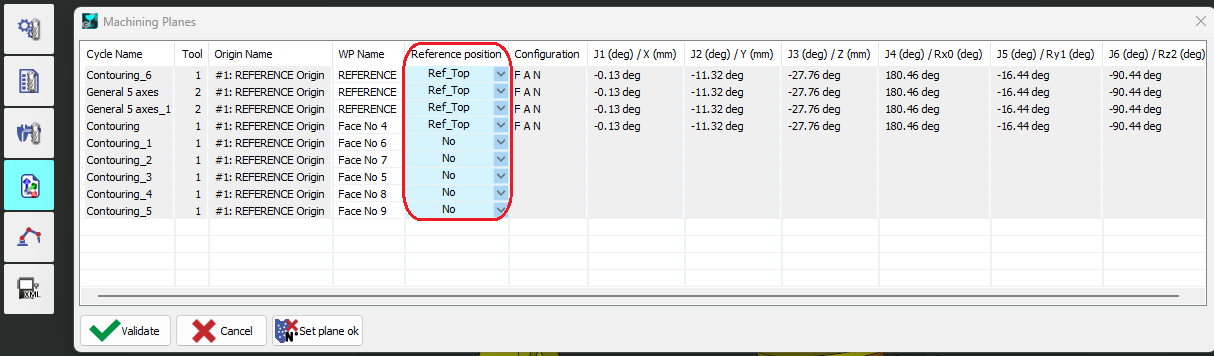
為了無歧義地將方向部分定義不清的刀具路徑轉換為機器人關節位置,需要 參考點 。從中我們提取:
-
機器人參考組態 → 在整個循環中保持。
-
機器人參考關節角度 → 第一個產生的機器人位置將以此為基礎(以確定關節轉動,特別是 J4 和 J6)。
-
參考 TCP 方向 → 用於定義進刀刀具方向。
參考點可以定義為:
-
關節格式(特定於機器人) → 通過正向運動學計算的刀具方向。
-
帶組態的笛卡兒格式(通用且可重複用於其他機器人手臂) → 通過逆向運動學計算的關節位置。
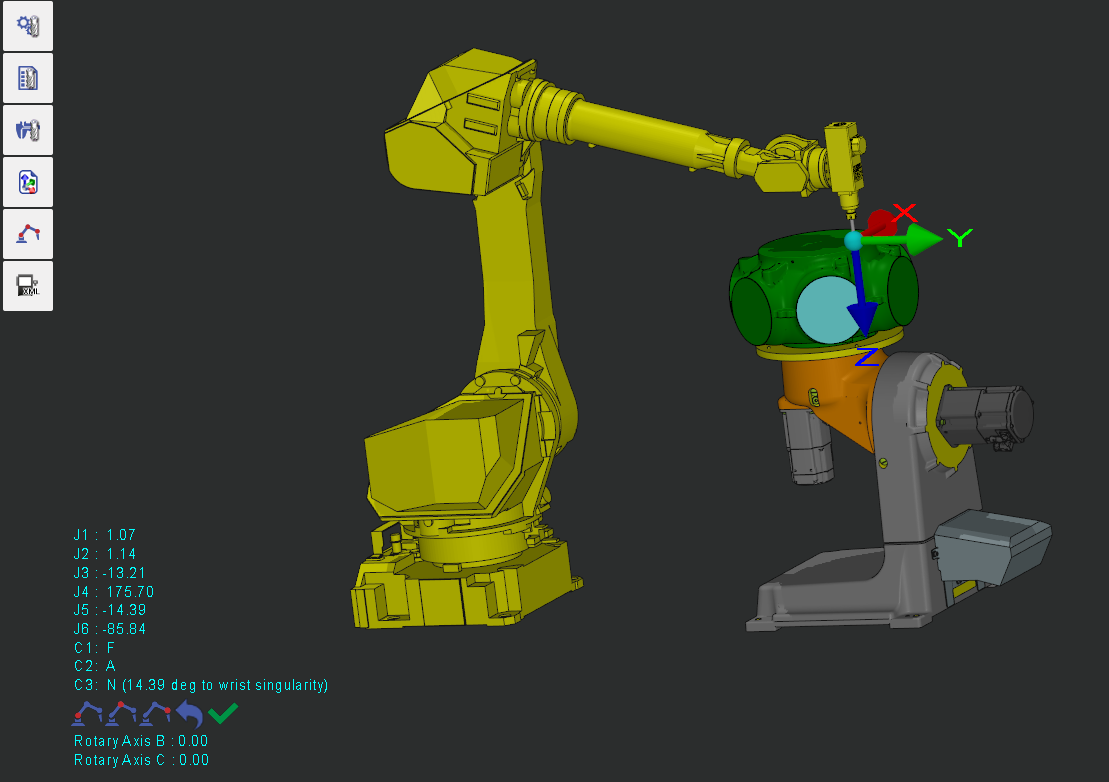
建立機器人參考點
-
選擇格式 (關節或笛卡兒)。

-
在 刀具 中,雙擊零件以定位機器人。
-
使用可用工具切換組態(肩部–肘部–腕部)、對齊刀具方向、平移(通過拖動或輸入距離)或旋轉(通過拖動或輸入角度)。
-
-
命名並儲存 參考點。
-
指派 創建的參考點給加工操作(可選)。
-
如果未指派參考點,則將使用循環前的機器人當前位置。
-