-
工作站通常包含比機器人手臂更多的設備(隔離單元、外部軸等)。
-
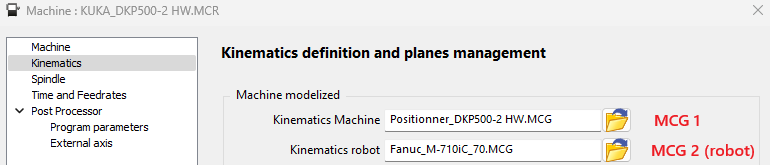
建議:使用 2 台機台 (MCG)
-
MCG 1 = 主要機台單元(含 外部元件位置 ).
-
MCG 2 = 僅機器人手臂。
-
使用 2 台機台的優點:
-
更換機器人手臂時可保留主要單元( MCG 1 ).
-
可重新定位機器人基座(在機台樹中雙擊機器人基座)以適應零件/刀具。
-
如果僅需要機器人手臂
-
MCG 1 = 機器人手臂。
-
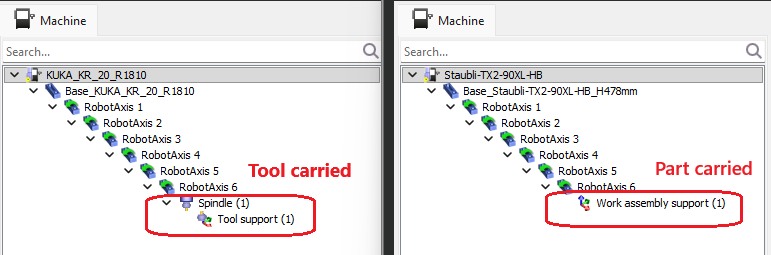
刀具或工件的支撐架必須始終連接到機器人法蘭(RobotAxis 6)。另一個支撐架可以在 MCG 1 或 MCG 2 中定義。
-
刀具支撐 在機器人法蘭上 = 刀具夾持。
-
工件 支撐 在機器人法蘭上 = 工件夾持。
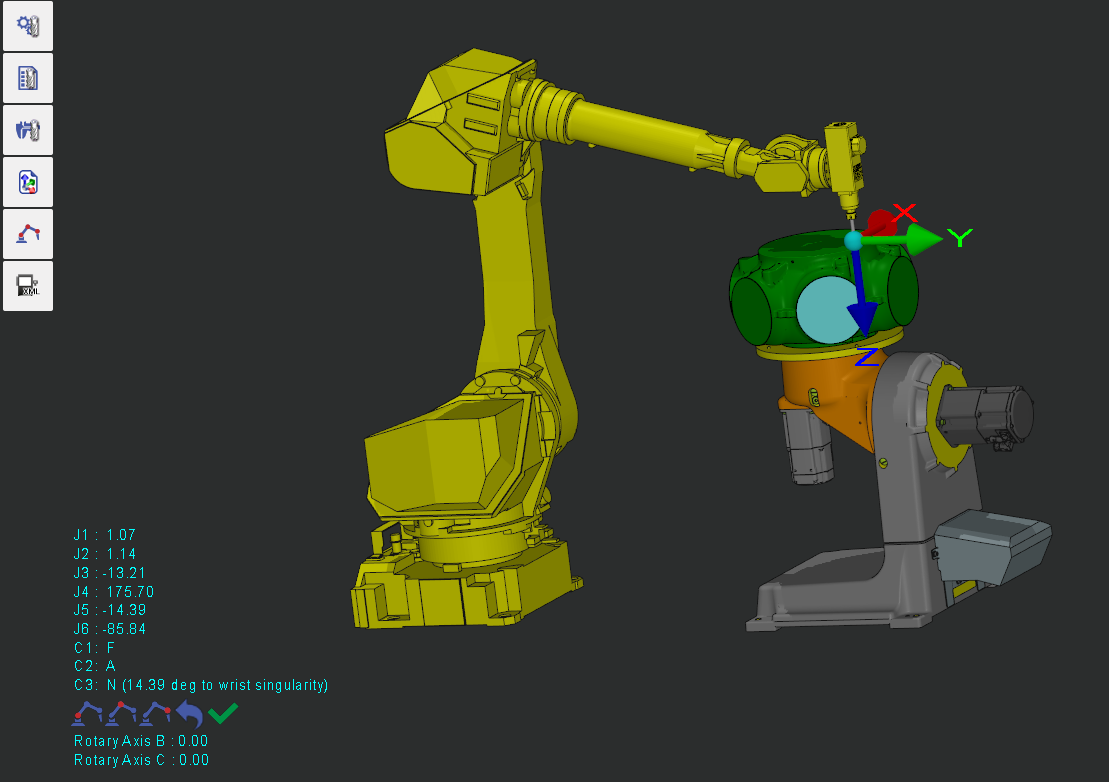
可達性預檢查
-
在刀具中,雙擊零件上的任何點 → 機器人會自動定位在那裡進行可達性預覽。