Bu sayfa, GO2CAM for Robot'ta Takımlandırma sekmeleri ve Simülasyon sekmelerinde kullanılan parametreleri yakalamayı amaçlamaktadır. Bu parametrelere Makine -> Kinematik yoluyla erişilebilir.
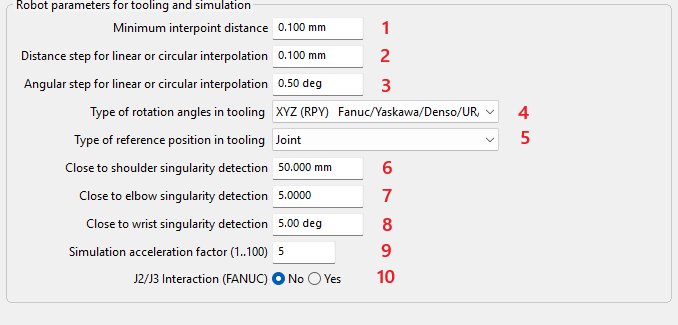
Noktalar arası minimum mesafe (1)
Hem MTE simülasyonu hem de CN dosyası çıktısı için, bu mesafeden daha yakın olan sonraki noktalar yok sayılacaktır. Minimum değer 0.001 mm'dir.
Bu parametre, CN dosyasındaki birbirine çok yakın olan robot yolu noktalarını filtrelemek için kullanılabilir, bu da daha pürüzsüz bir robot yolu sağlar, ancak yol doğruluğu azalabilir.
Doğrusal veya dairesel enterpolasyon için mesafe adımı (2)
Bu parametre, büyük takım yolları için hesaplama süresini azaltmak veya NC dosya çıktısı için yolu ayrıştırmak (PP'de doğrusal hareket yolu ayrıştırması etkinse) için kullanılabilir. Minimum değer 0.1 mm'dir.
Doğrusal veya dairesel enterpolasyon için açısal adım (3)
Bu parametre, büyük takım yolları için hesaplama süresini azaltmak veya NC dosya çıktısı için yolu ayrıştırmak (PP'de doğrusal hareket yolu ayrıştırması etkinse) için kullanılabilir. Minimum değer 1 derecedir.
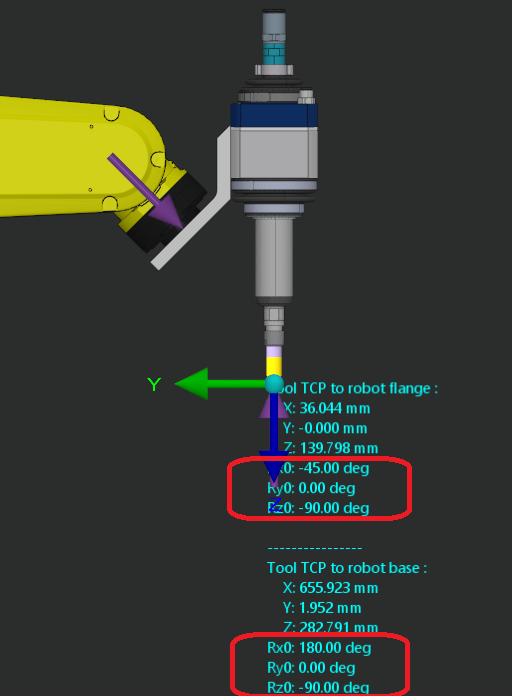
Takımlandırmada rotasyon açıları tipi (4)
Bu parametre, farklı robot kontrolörleri tarafından kullanılan rotasyon açısı kurallarını tanımlar. Takımlandırmada TCP çerçevesi ve kullanıcı çerçevesi için uygulanır.
Takımlandırmada referans konumu tipi (5)
Referans konumları eklem (mutlak, robota özgü) veya Kartezyen (parça orijinine göreceli, diğer robot modellerine aktarılabilir) olarak tanımlanabilir. Mevcut referans konumları, türlerini değiştirmek için yeniden kaydedilebilir.
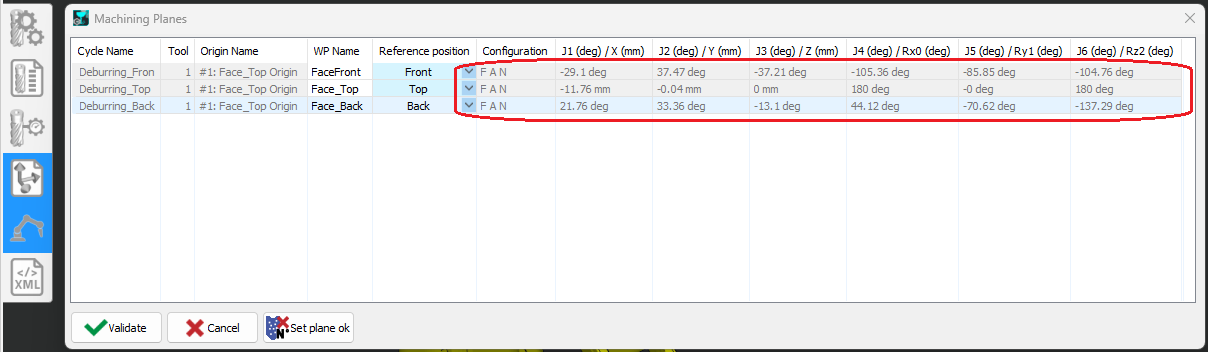
Robot yolu oluşturma sırasında parça hareket edebiliyorsa (örneğin, ek bir pozisyoner kullanarak), belirsizliği önlemek için eklem tipi bir referans konumu önerilir.
Dirsek tekilliği algılama eşiği (6)
Omuz tekilliği algılama eşiği. Bu parametre, robot tekilliğinden minimum bir mesafeyi sağlamaya yardımcı olur.
Dirsek tekilliği algılama eşiği (7)
Dirsek tekilliği algılama eşiği. Bu parametre, robot tekilliğinden minimum bir mesafeyi sağlamaya yardımcı olur.
Bilek tekilliği algılama eşiği (8)
Bilek tekilliği algılama eşiği. Bu parametre, robot tekilliğinden minimum bir mesafeyi sağlamaya yardımcı olur.
Simülasyon hızlandırma faktörü (9)
Büyük takım yolları için MTE simülasyonunu hızlandırmak üzere enterpole edilmiş noktalar için yeniden örnekleme faktörü. Simülasyon ve çarpışma algılama doğruluğunu azaltabilir. CN çıktısı üzerinde etkisi yoktur.
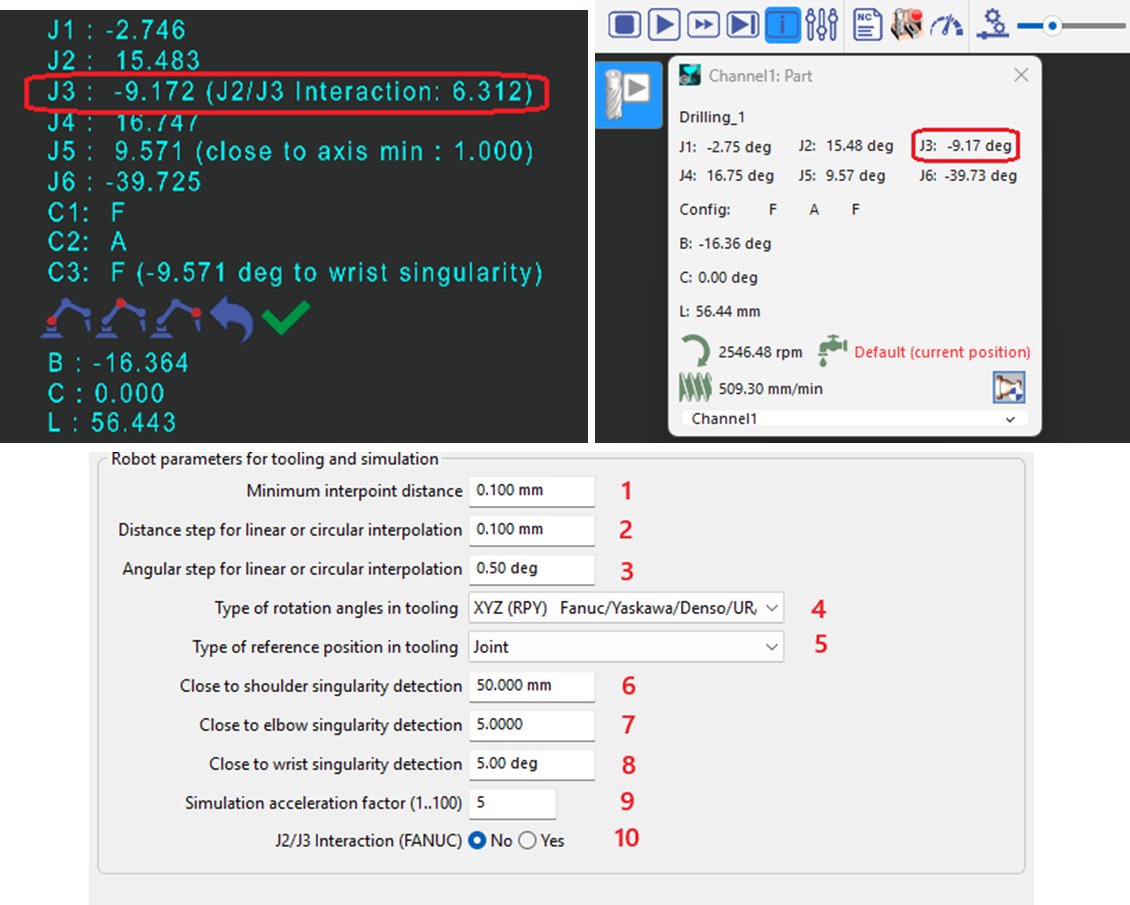
J2/J3 etkileşimi (10)
Bu seçenek, Fanuc robot ailesinde olduğu gibi J2 ve J3'ün bağlı olduğu durumlarda J3 için TP'de görüntülenen eklem açısını eşleştirmek üzere etkinleştirilebilir. Bu seçenek, takımlandırmadaki ve MTE simülasyonundaki robot eklem açısı koordinat gösterimi ve makine parametrelerindeki eklem açısı sınırları için geçerlidir.