Robotlar Neden?
|
Robot teknolojilerindeki gelişmeler, üretim kalitesindeki iyileşmeler, makine verimliliğindeki artışlar ve sanayileşmenin yaygınlaşmasıyla küresel CAM pazarı hızla büyüyor. Robotlar, zamanla yüksek yatırım getirisi (ROI) ile 7/24 çalışma, 50 mikronun altındaki hassasiyetle olağanüstü tekrarlanabilirlik sunar. Çeşitli endüstrilerde inovasyonu yönlendirerek ve üretkenliği artırarak Endüstri 4.0, makine öğrenimi ve yapay zeka alanlarında ilerleme kaydetmek için kritik öneme sahiptirler. |
Robot Çevrimdışı Programlama (OLP)
|
Geleneksel olarak robotlar, görevleri manuel olarak yönlendiren elde taşınan bir cihaz olan Teach Pendant kullanılarak öğretilir. Bu yöntem zahmetli, riskli ve zaman alıcı olabilir. Çevrimdışı Robot Programlama (OLP), operatörlerin robotlara yüklenmeden önce robot yollarını oluşturup doğrulamak için dijital 3B modellerle uzaktan çalışmasına olanak tanır. Bu, manuel öğretime olan ihtiyacı azaltır, güvenliği artırır ve verimliliği iyileştirir. ROP'un Faydaları:
|

|
GO2cam Robotun Teknik Özellikleri
|
GO2CAM, robot kinematiği hesaplaması için güçlü bir matematiksel motora sahip OLP'yi uygulamak için tüm altyapıya sahiptir. GO2CAM'in amacı, robot programlamanın zorluklarının büyük çoğunluğunu yazılım içinde tutmak ve müşteri için bir robotu freze makinesi kadar kolay kullanmaktır. GO2cam'deki ROP şunlar için geçerlidir: |
||
|
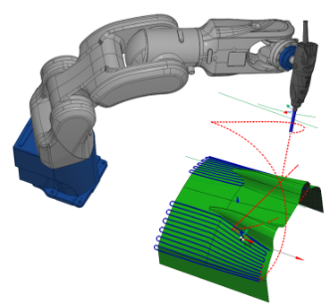
> Robotun sürekli bir yolu takip etmesi beklenen görevler için iş akışı, makine aleti için olanla neredeyse aynıdır
|
|
|
|
> Robotun yalnızca birkaç ara noktadan geçmesi gereken görevler için, tüm yolu planlamak üzere etkileşimli bir arayüz kullanılır
|

|
|
|
Yazılım neredeyse tüm seri 6 eksenli robotları işleyebilir: |
|
|
|
Tip 1 : Son 3 eksenin bir noktada kesiştiği çoğu endüstriyel 6 eksenli robot 
|
Tip 2 : 2., 3. ve 4. eksenlerin paralel olduğu çoğu işbirlikçi robot 
|
Tip 3 : Tip 1 gibi, son üç eksenin bir noktada kesişmemesi dışında (Fanuc CRX) 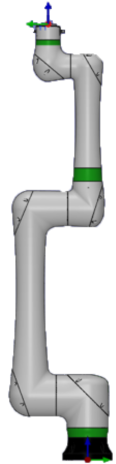
|
GO2cam'de robotları programlama adımları temel olarak şunlardır:
-
Diğer robot hücresi için yeniden kullanılabilecek parçanın CAM'ı.
-
Diğer parçalar için yeniden kullanılabilecek robot hücresi tasarımı.
-
Robot işleme stratejisi ayarı
-
Simülasyon ve çarpışma algılama
-
PP ve tekno fonksiyon ayarı
-
Robot programı oluşturma