Kaldırılacak önemli bir malzeme yoksa, stoğu parça ile aynı geometriye sahip olarak ayarlamanız önerilir. Bunu yapmak için parçayı kopyalayın ve stok olarak atayın.
Simülasyonu şununla çalıştırın çarpışma kontrolü etkin . Oluşmaları durumunda çarpışmaları önlemek için çeşitli seçenekler mevcuttur:
-
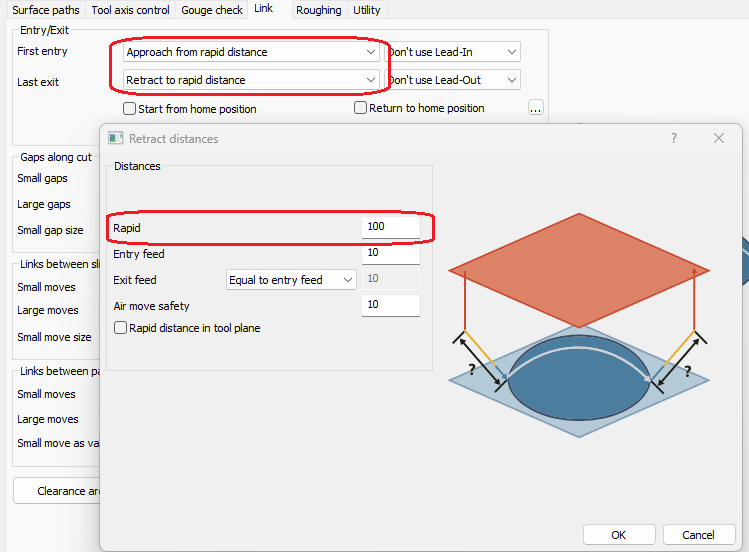
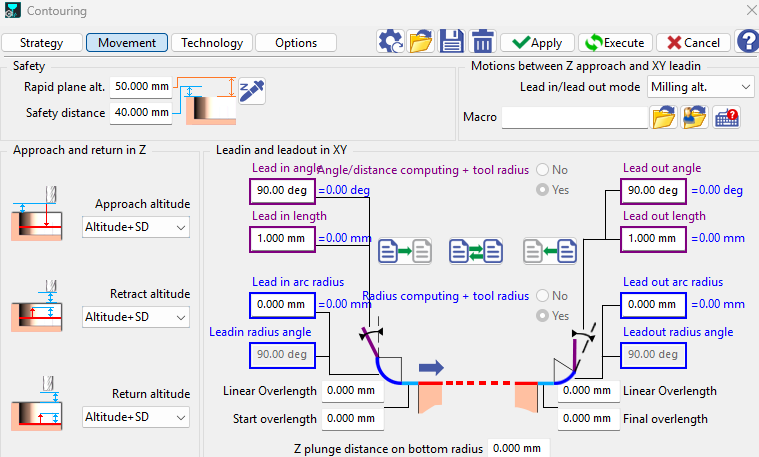
Bir çevrim yaklaşma veya geri dönüş noktalarında çarpışmalar oluşursa:
-
Yaklaşma/geri dönüş parametrelerini (örn. mesafe) sıfırlayın.
-
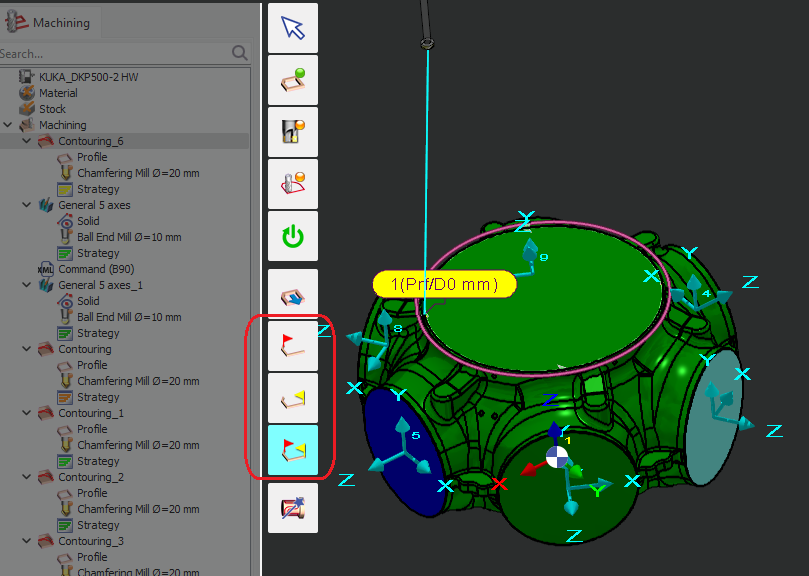
Ek yaklaşma/geri dönüş noktaları ekleyin.
-
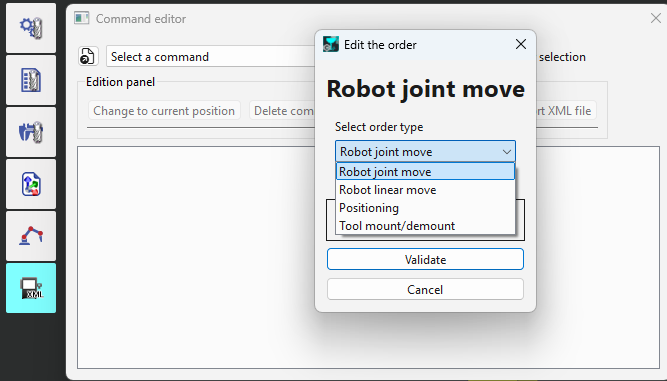
Create and insert a Makine Komutu move before or after the cycle.
-
Tekillik riskinden kaçınmak için, gereksiz olmadıkça robot doğrusal hareketi kullanmayın .
-
Öneri: Yöntemleri tercih edin a veya b , çünkü bunlar çevrimin kendisini değiştirir ve daha sonra diğer robotlar için (örn. bir Opelist'te) yeniden kullanılabilir.
-
-
Bir robot olmayan ekseni makine komutu için seçilebilir hale getirmek Konumlandırma , olarak tanımlanmalıdır programlanabilir .
Kullanılması önerilmez MOVE_COMPONENT GO2Robot'ta. İlk olarak, tek bir MOVE_COMPONENT komutu yalnızca bir ekseni hareket ettirir; 6 eksenli bir robotu hareket ettirmek için altı ayrı MOVE_COMPONENT komutuna ihtiyacınız olurdu ve hareketler senkronize olmazdı. İkinci olarak, robotlar için CN dosyaları oluşturmak uygun değildir. Bunun yerine, şunu kullanın Makine Komutu , bu da birden çok ekseni aynı anda hareket ettirebilir.
-
Diğer durumlar için:
-
Çevrimin robot stratejisini değiştirin.
-
Robot referans konumunu değiştirin.
-
Yeni bir robot yolu denemek için robotu veya parçayı yeniden konumlandırın.
-
…
-