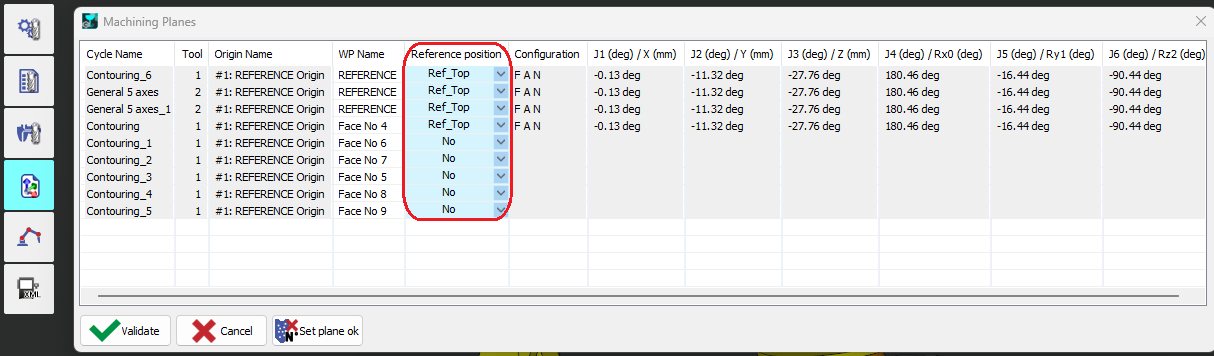
Yönü kısmen belirsiz olan bir takım yolunu, belirsizlik olmadan robot eklem pozisyonlarına dönüştürmek için bir referans pozisyonu gereklidir. Bundan şunlar çıkarılır:
-
Robot referans konfigürasyonu → döngü boyunca korunur.
-
Robot referans eklem açıları → oluşturulan ilk robot pozisyonu bunlara uyacaktır (özellikle J4 ve J6 eklem dönüşlerini belirlemek için).
-
Referans TCP oryantasyonu → giriş takımının yönünü belirlemek için kullanılır.
Referans pozisyonu şu şekilde tanımlanabilir:
-
Eklem formatı (robota özel) → ileri kinematik yoluyla hesaplanan takım yönü.
-
Konfigürasyonlu Kartezyen format (genel ve diğer robot kolları için yeniden kullanılabilir) → ters kinematik yoluyla hesaplanan eklem pozisyonları.
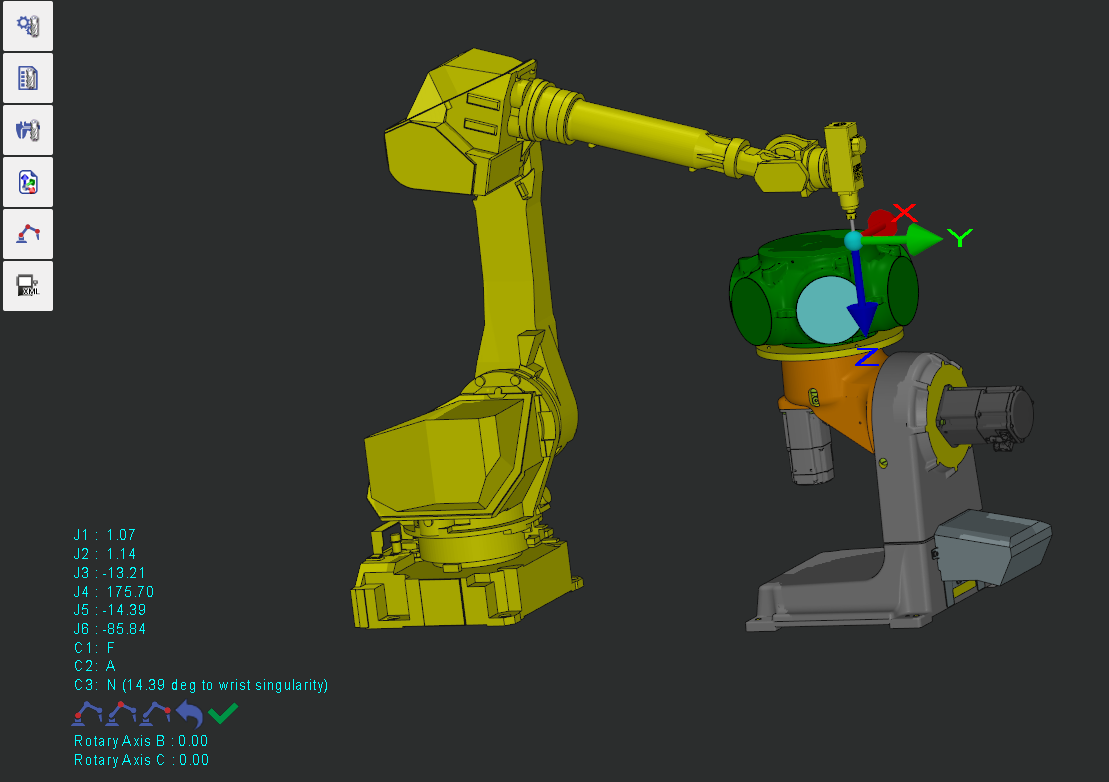
Robot Referans Pozisyonu Oluşturma
-
Formatı seçin (Eklem veya Kartezyen).

-
İçinde Takım , robotu konumlandırmak için parçaya çift tıklayın.
-
Konfigürasyonu değiştirmek (omuz–dirsek–bilek), takım yönünü hizalamak, taşımak (sürükleyerek veya mesafe girerek) veya döndürmek (sürükleyerek veya açı girerek) için mevcut araçları kullanın.
-
-
Adlandırın ve kaydedin referans pozisyonunu.
-
Atayın oluşturulan referans pozisyonunu işleme operasyonlarına (isteğe bağlı).
-
Eğer referans pozisyonu atanmamışsa, döngüden önceki robotun mevcut konumu kullanılacaktır.
-