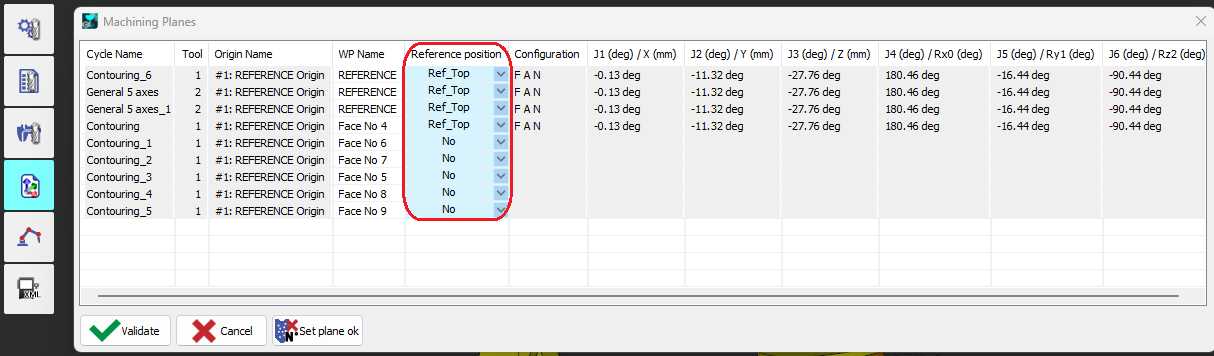
Pour convertir un trajet avec une orientation partiellement indéfinie en positions d'articulations de robot sans ambiguïté, une position de référence est requise. À partir de celle ci nous extrayons :
-
Configuration de référence du robot → maintenue tout au long du cycle.
-
Angles d'articulations de référence du robot → la première position robot générée sera ajustée à ceux ci (pour déterminer les tours d'articulations, notamment J4 et J6).
-
Orientation TCP de référence → utilisée pour définir l'orientation de l'outil d'approche.
La position de référence peut être définie comme :
-
Format articulations (spécifique au robot) → orientation outil calculée via cinématique directe.
-
Format cartésien avec configuration (générique et réutilisable pour d'autres bras robotisés) → positions d'articulations calculées via cinématique inverse.
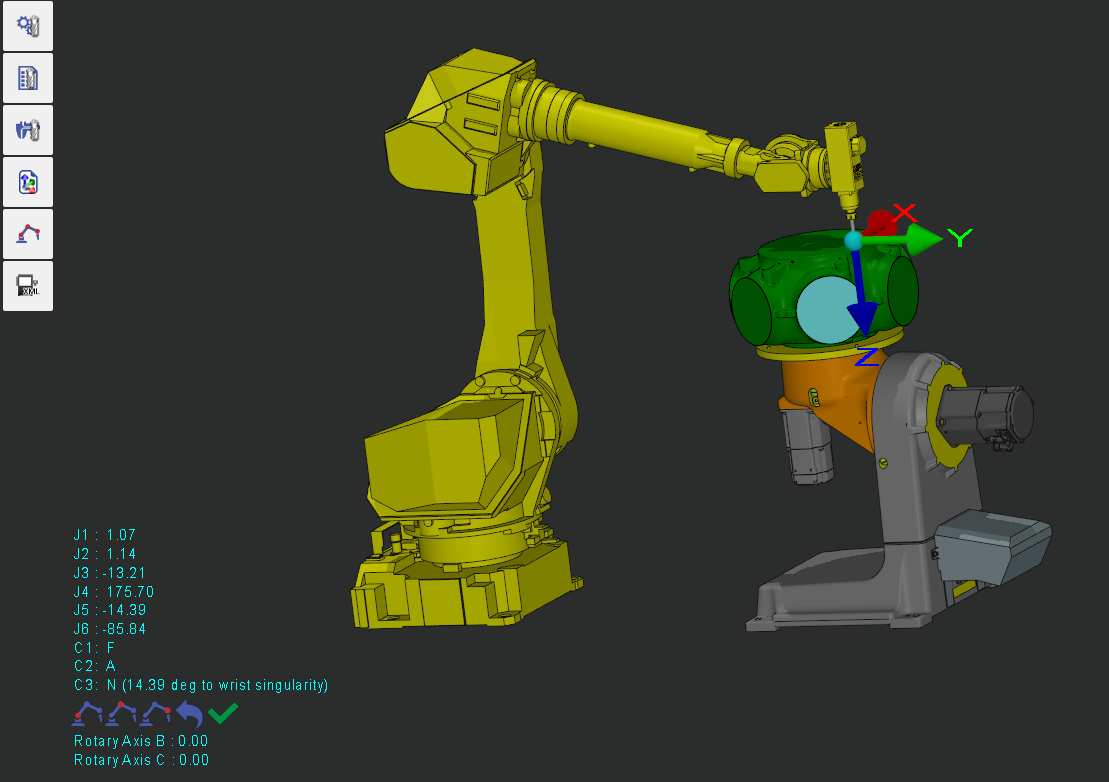
Création d'une position de référence robot
-
Sélectionner le format (Articulations ou Cartésien).

-
Dans Outillage , double cliquez sur la pièce pour positionner le robot.
-
Utiliser les outils disponibles pour changer de configuration (épaule–coude–poignet), aligner l'orientation de l'outil, translater (en glissant ou en entrant une distance), ou pivoter (en glissant ou en entrant un angle).
-
-
Nommer et sauvegarder la position de référence.
-
Affecter la position de référence créée aux opérations d'usinage (optionnel).
-
Si aucune position de référence n'est affectée, la position actuelle du robot avant le cycle sera utilisée.
-