Pourquoi les robots ?
|
Le marché mondial de la CFAO connaît une croissance rapide grâce aux avancées des technologies robotiques, à l'amélioration de la qualité de production, à l'optimisation de l'efficacité des machines et à l'industrialisation croissante. Les robots offrent un fonctionnement 24h/24 et 7j/7, une répétabilité exceptionnelle avec une précision souvent inférieure à 50 microns, et un retour sur investissement (ROI) élevé sur le long terme. Ils sont essentiels pour faire progresser l'Industrie 4.0, l'apprentissage automatique et l'IA, stimulant l'innovation et améliorant la productivité dans diverses industries. |
Programmation Hors Ligne de Robot (OLP)
|
Traditionnellement, les robots sont programmés à l'aide d'un boîtier d'apprentissage (Teach Pendant), un appareil portable qui guide manuellement le robot à travers les tâches. Cette méthode peut être fastidieuse, risquée et prendre du temps. La Programmation Hors Ligne de Robot (OLP) permet aux opérateurs de travailler à distance avec des modèles 3D numériques pour générer et valider les trajectoires du robot avant de les télécharger sur le robot. Cela réduit l'apprentissage manuel, améliore la sécurité et augmente l'efficacité. Avantages de l'OLP :
|

|
Caractéristiques techniques de GO2cam Robot
|
GO2CAM dispose de toute l'infrastructure pour implémenter l'OLP avec un puissant moteur mathématique pour le calcul de la cinématique des robots. L'objectif de GO2CAM est de conserver la majeure partie de la complexité de la programmation robot dans le logiciel et de rendre un robot aussi facile à utiliser qu'une fraiseuse pour le client. L'OLP dans GO2cam est applicable : |
||
|
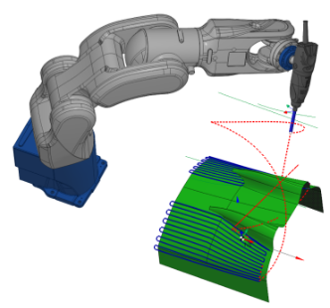
> Pour les tâches pour lesquelles le robot doit suivre un chemin continu, le flux de travail est presque identique à celui des machines-outils
|
|
|
|
> Pour les tâches pour lesquelles le robot doit simplement passer par plusieurs points de cheminement, une interface interactive est utilisée pour planifier l'ensemble du trajet
|

|
|
|
Le logiciel peut traiter presque tous les robots série 6 axes : |
|
|
|
Type 1 : La plupart des robots industriels 6 axes où les 3 derniers axes s'intersectent en un point 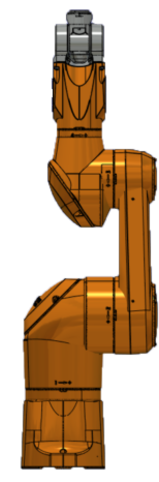
|
Type 2 : La plupart des robots collaboratifs où les 2ème, 3ème et 4ème axes sont parallèles 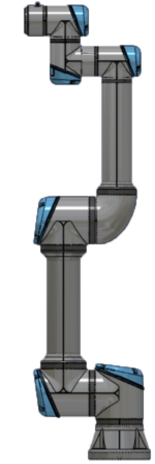
|
Type 3 : Comme le type 1, sauf que les trois derniers axes ne s'intersectent pas en un point (Fanuc CRX) 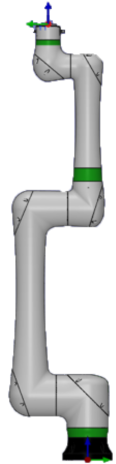
|
Les étapes pour programmer les robots dans GO2cam sont principalement les suivantes :
-
CFAO de la pièce, qui peut être réutilisée pour d'autres cellules robotisées.
-
Conception de la cellule robotisée, qui peut être réutilisée pour d'autres pièces.
-
Réglage de la stratégie d'usinage du robot
-
Simulation et détection de collision
-
Réglage des fonctions PP et techno
-
Génération du programme robot