S'il n'y a pas de matière significative à enlever, il est recommandé de définir le brut avec la même géométrie que la pièce. Pour ce faire, dupliquer la pièce et l'affecter comme brut.
Lancer la simulation avec Vérification de collision activée . Plusieurs options sont disponibles pour éviter les collisions si elles se produisent :
-
Si des collisions se produisent aux points d'approche ou de retour d'un cycle :
-
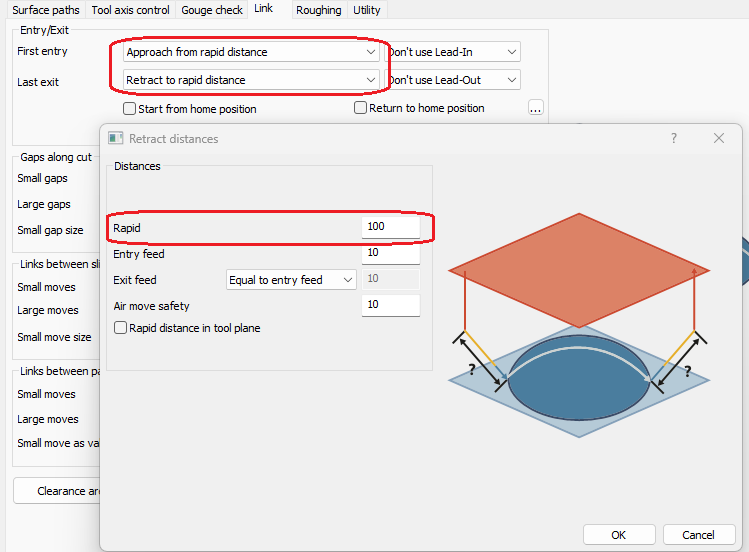
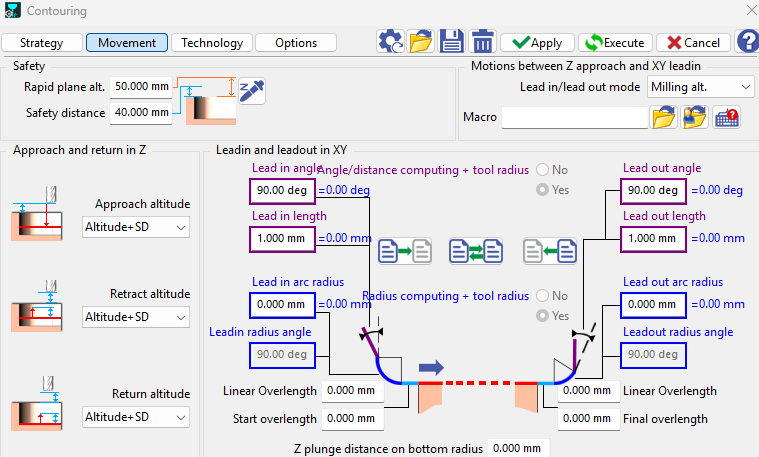
Réinitialiser les paramètres d'approche/retour (par exemple, la distance).
-
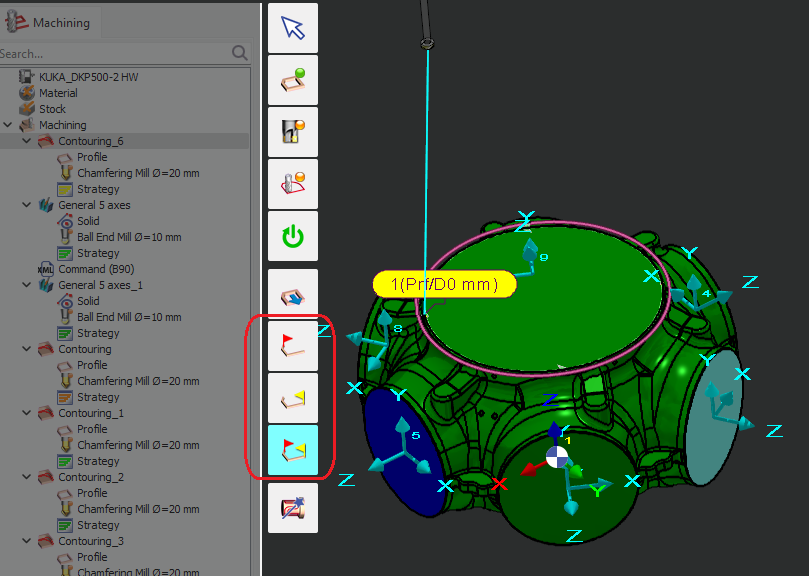
Ajouter des points d'approche/retour supplémentaires.
-
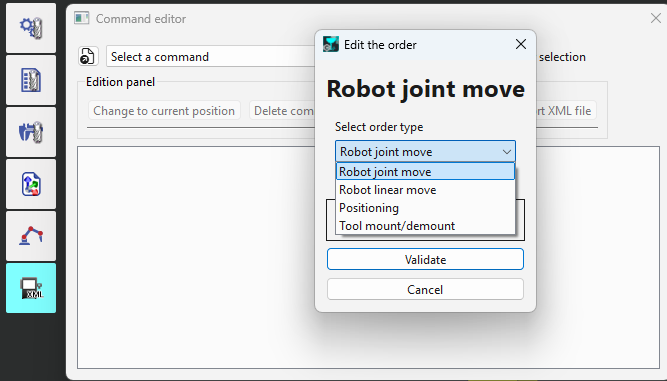
Create and insert a Commande machine move before or after the cycle.
-
N'utilisez pas un déplacement linéaire de robot sauf si nécessaire , pour éviter le risque de singularités.
-
Recommandation : Privilégier les méthodes a ou b , car elles modifient le cycle lui-même, qui pourra ensuite être réutilisé pour d'autres robots (par exemple, dans une Opelist).
-
-
Pour rendre un axe non robot sélectionnable pour la commande machine Positionnement , il doit être défini comme programmable .
Il n'est pas recommandé d'utiliser MOVE_COMPONENT dans GO2Robot. Premièrement, une seule commande MOVE_COMPONENT déplace un seul axe ; pour déplacer un robot 6 axes il faudrait six commandes MOVE_COMPONENT distinctes, et les déplacements ne seraient pas synchronisés. Deuxièmement, il n'est pas approprié de sortir des fichiers CN pour les robots. Utilisez plutôt le Commande machine , qui peut déplacer plusieurs axes simultanément.
-
Pour les autres cas :
-
Changer la stratégie robot du cycle.
-
Modifier la position de référence du robot.
-
Repositionner le robot ou la pièce pour tester un nouveau parcours robot.
-
…
-