Cette page vise à capturer les paramètres utilisés dans l'onglet Outillage et l'onglet Simulation dans GO2CAM pour Robot. Ces paramètres sont accessibles via Machine -> Cinématique.
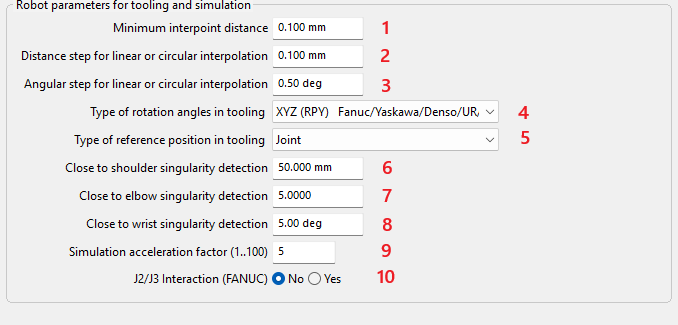
Distance minimale inter-points (1)
Pour la simulation MTE et la sortie fichier CN, tout point suivant plus proche que cette distance sera ignoré. Le minimum est de 0.001 mm.
Ce paramètre peut être utilisé pour filtrer les points de trajectoire robot très proches dans le fichier CN, ce qui permet d'obtenir une trajectoire robot plus fluide, mais la précision de la trajectoire peut être réduite.
Pas de distance pour interpolation linéaire ou circulaire (2)
Ce paramètre peut être utilisé pour réduire le temps de calcul pour les grandes trajectoires ou pour discrétiser la trajectoire pour la sortie fichier CN (si la discrétisation de la trajectoire en mouvement linéaire est activée dans le PP). La valeur minimale est de 0.1 mm.
Pas angulaire pour interpolation linéaire ou circulaire (3)
Ce paramètre peut être utilisé pour réduire le temps de calcul pour les grandes trajectoires ou pour discrétiser la trajectoire pour la sortie fichier CN (si la discrétisation de la trajectoire en mouvement linéaire est activée dans le PP). La valeur minimale est de 1 degré.
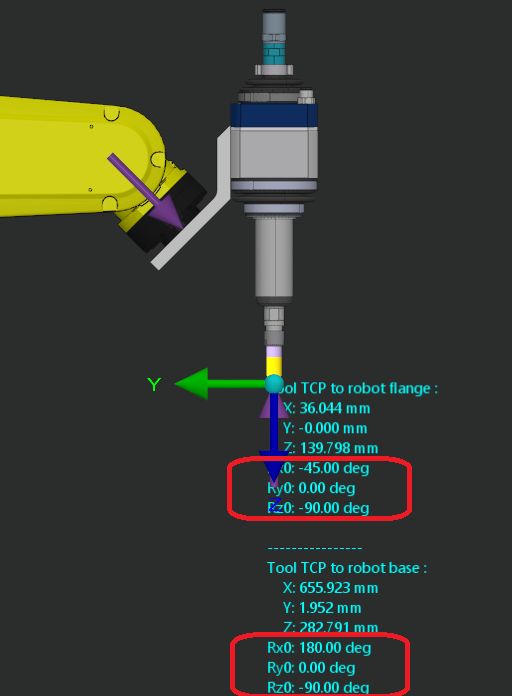
Type d'angles de rotation en outillage (4)
Ce paramètre définit les conventions d'angles de rotation utilisées par différents contrôleurs de robot. Il est appliqué en outillage pour le repère TCP et le repère utilisateur.
Type de position de référence en outillage (5)
Les positions de référence peuvent être définies comme jointure (absolues, spécifiques au robot) ou cartésiennes (relatives à l'origine pièce, transférables à d'autres modèles de robot). Les positions de référence existantes peuvent être réenregistrées pour changer leur type.
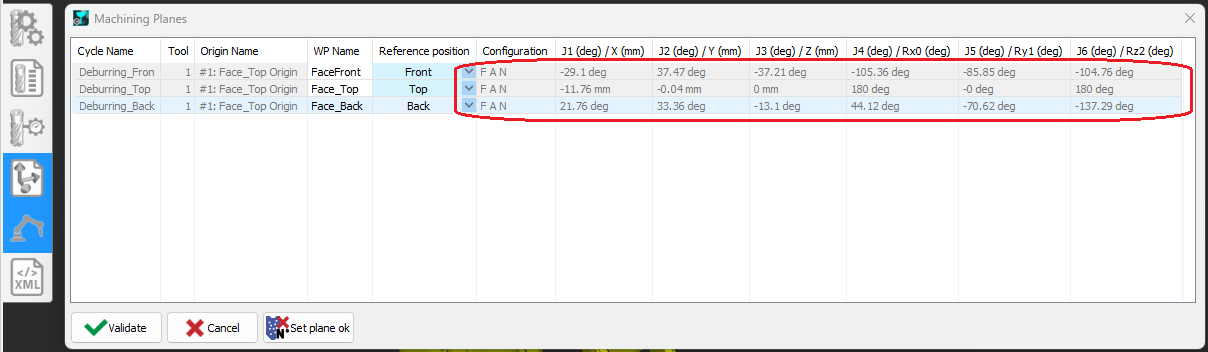
Si la pièce peut bouger pendant la génération de la trajectoire robot (par exemple, en utilisant un positionneur supplémentaire), une position de référence de type jointure est recommandée pour éviter toute ambiguïté.
Détection proximité singularité coude (6)
Seuil de détection de singularité d'épaule. Ce paramètre permet de garantir une distance minimale par rapport à la singularité du robot.
Détection proximité singularité coude (7)
Seuil de détection de singularité de coude. Ce paramètre permet de garantir une distance minimale par rapport à la singularité du robot.
Détection proximité singularité poignet (8)
Seuil de détection de singularité de poignet. Ce paramètre permet de garantir une distance minimale par rapport à la singularité du robot.
Facteur d'accélération de simulation (9)
Facteur de rééchantillonnage pour les points interpolés afin d'accélérer la simulation MTE (pour les grandes trajectoires). Peut réduire la précision de la simulation et de la détection de collision. Aucun effet sur la sortie CN.
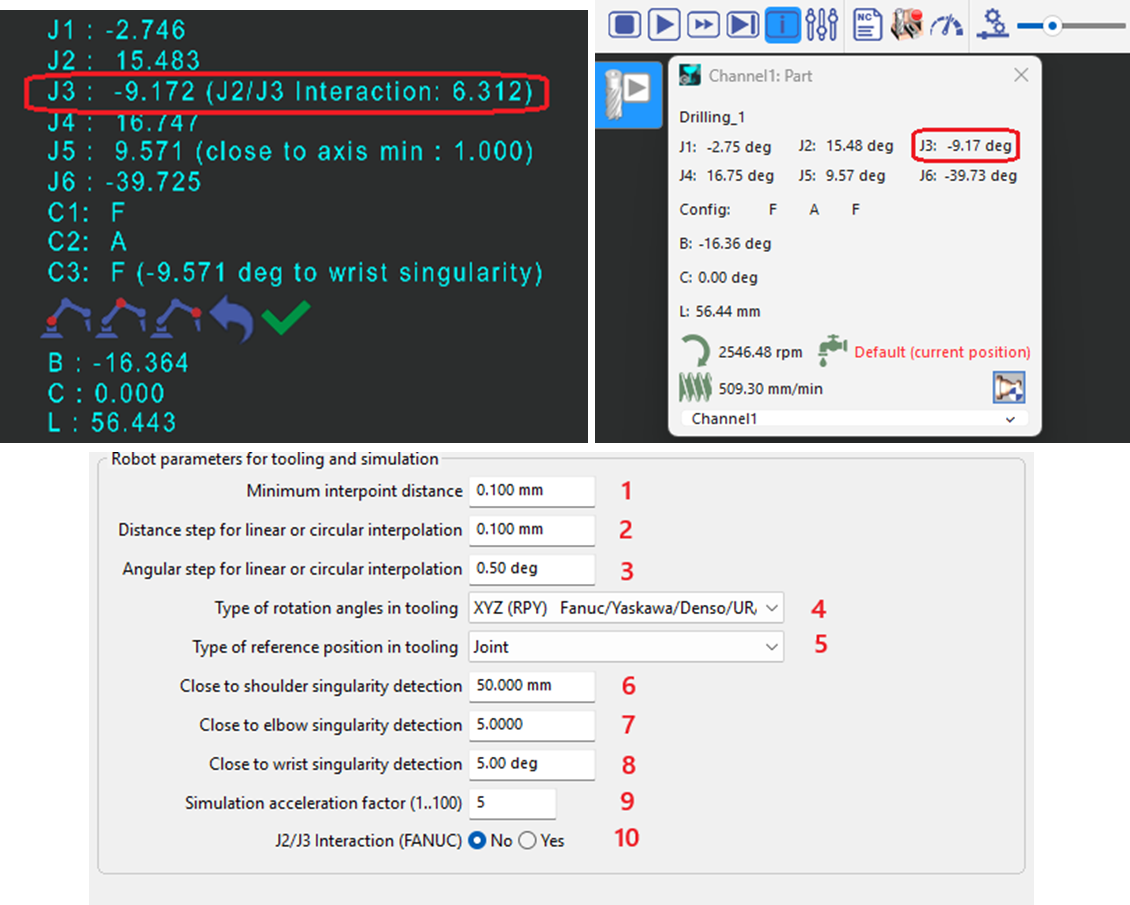
Interaction J2/J3 (10)
Cette option peut être activée pour faire correspondre l'angle de jointure affiché sur le TP pour J3 lorsque J2 et J3 sont couplés, comme dans la famille de robots Fanuc. Cette option s'applique à l'affichage des coordonnées des angles de jointure du robot en outillage et en simulation MTE, ainsi qu'aux limites des angles de jointure dans les paramètres machine.