Wenn kein signifikantes Material zu entfernen ist, wird empfohlen, das Rohteil mit der gleichen Geometrie wie das Teil zu definieren. Duplizieren Sie dazu das Teil und weisen Sie es als Rohteil zu.
Führen Sie die Simulation mit Kollisionsprüfung aktiviert aus. Mehrere Optionen sind verfügbar, um Kollisionen zu vermeiden, falls sie auftreten:
-
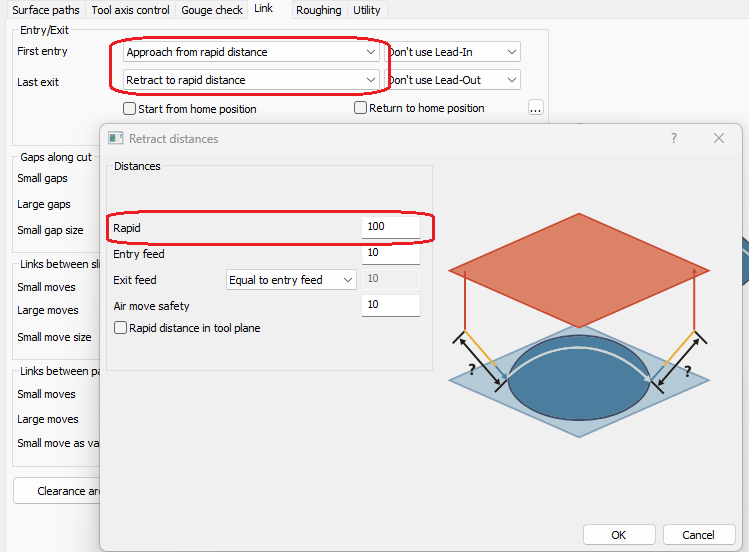
Wenn Kollisionen bei Anfahr- oder Rückfahrpunkten eines Zyklus auftreten:
-
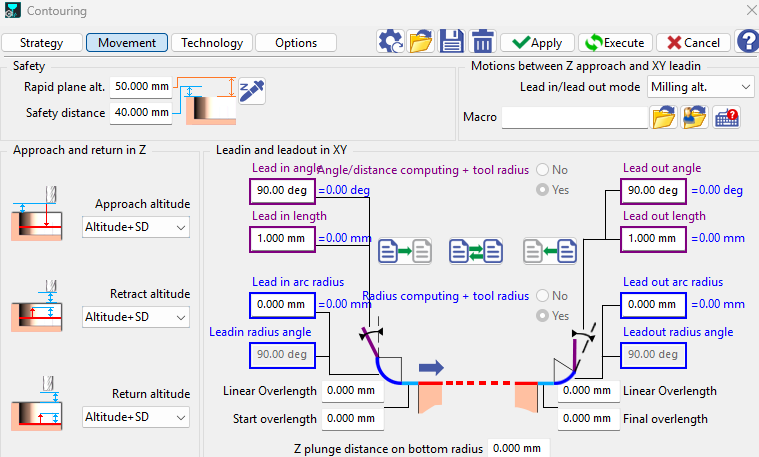
Setzen Sie die Anfahr-/Rückfahrparameter zurück (z.B. Abstand).
-
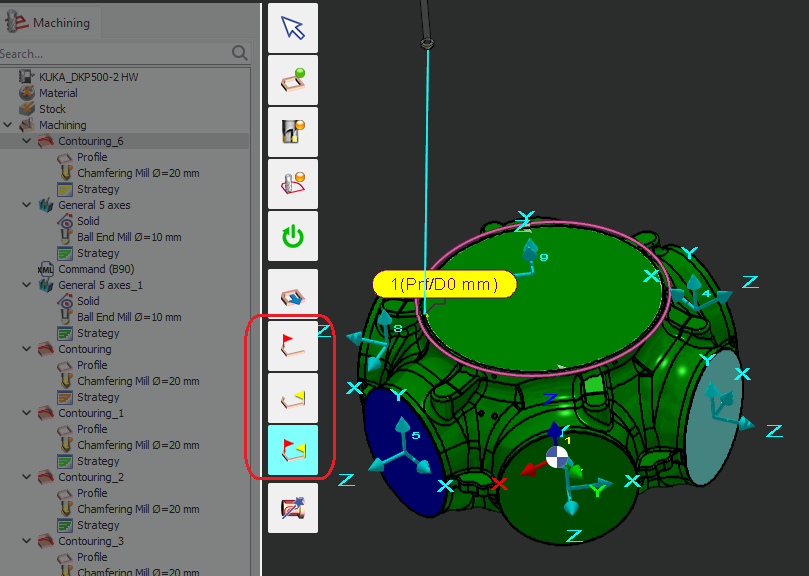
Fügen Sie zusätzliche Anfahr-/Rückfahrpunkte hinzu.
-
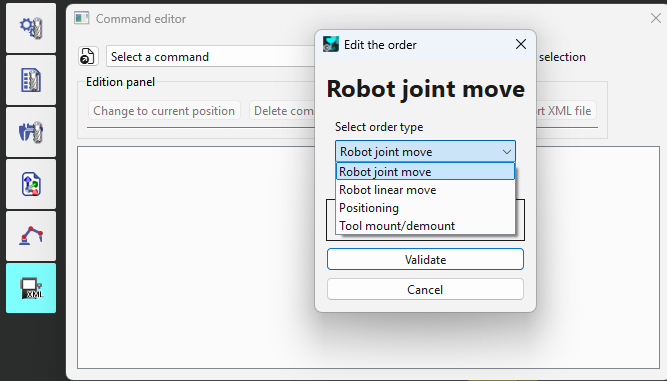
Create and insert a Maschinenbefehl move before or after the cycle.
-
Verwenden Sie keine lineare Roboterbewegung, es sei denn, dies ist notwendig , um das Risiko von Singularitäten zu vermeiden.
-
Empfehlung: Bevorzugen Sie die Methoden a oder b , da diese den Zyklus selbst modifizieren, der dann für andere Roboter wiederverwendet werden kann (z.B. in einer Opelist).
-
-
Um eine Nicht-Roboter-Achse für den Maschinenbefehl auswählbar zu machen Positionierung , muss sie als programmierbar .
Es wird nicht empfohlen, zu verwenden MOVE_COMPONENT in GO2Robot. Erstens bewegt ein einzelner MOVE_COMPONENT-Befehl nur eine Achse; um einen 6-Achsen-Roboter zu bewegen, bräuchten Sie sechs separate MOVE_COMPONENT-Befehle, und die Bewegungen wären nicht synchronisiert. Zweitens ist es nicht angebracht, NC-Dateien für Roboter auszugeben. Verwenden Sie stattdessen die Maschinenbefehl , die mehrere Achsen gleichzeitig bewegen kann.
-
Für andere Fälle:
-
Ändern Sie die Roboterstrategie des Zyklus.
-
Modifizieren Sie die Roboter-Referenzposition.
-
Positionieren Sie den Roboter oder das Teil neu, um einen neuen Roboterpfad zu testen.
-
…
-