Diese Seite soll die Parameter erfassen, die im Reiter Werkzeuge und im Reiter Simulation in GO2CAM für Roboter verwendet werden. Diese Parameter sind über Maschine -> Kinematik zugänglich.
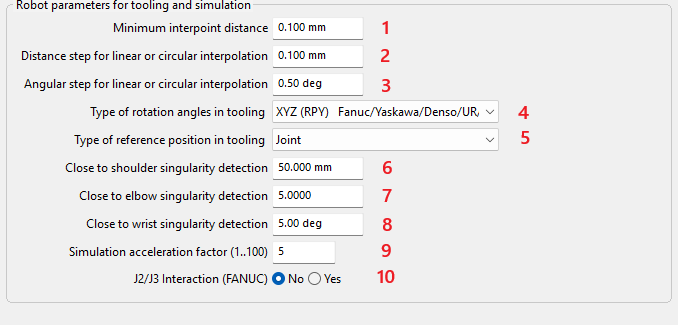
Minimaler Punktabstand (1)
Sowohl für die MTE-Simulation als auch für die NC-Datenausgabe werden alle folgenden Punkte, die näher als dieser Abstand sind, ignoriert. Das Minimum beträgt 0,001 mm.
Dieser Parameter kann verwendet werden, um Roboterpfadpunkte zu filtern, die im NC-Datensatz sehr nah beieinander liegen, was zu einem glatteren Roboterpfad führt, aber die Pfadgenauigkeit kann reduziert werden.
Abstandsschritt für lineare oder zirkulare Interpolation (2)
Dieser Parameter kann verwendet werden, um die Rechenzeit für große Werkzeugwege zu reduzieren oder den Pfad für die NC-Datenausgabe zu diskretisieren (wenn die Diskretisierung des linearen Bewegungsablaufs im PP aktiviert ist). Der Mindestwert beträgt 0,1 mm.
Winkelschritt für lineare oder zirkulare Interpolation (3)
Dieser Parameter kann verwendet werden, um die Rechenzeit für große Werkzeugwege zu reduzieren oder den Pfad für die NC-Datenausgabe zu diskretisieren (wenn die Diskretisierung des linearen Bewegungsablaufs im PP aktiviert ist). Der Mindestwert beträgt 1 Grad.
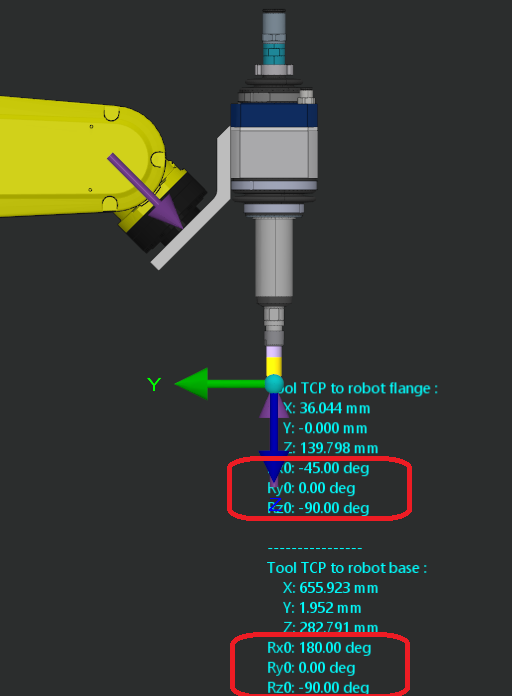
Art der Rotationswinkel in der Werkzeugverwaltung (4)
Dieser Parameter definiert die Konventionen für Rotationswinkel, die von verschiedenen Robotersteuerungen verwendet werden. Er wird in der Werkzeugverwaltung für den TCP-Rahmen und den Benutzerrahmen angewendet.
Art der Referenzposition in der Werkzeugverwaltung (5)
Referenzpositionen können als Gelenk (absolut, roboter-spezifisch) oder kartesisch (relativ zum Teileursprung, übertragbar auf andere Robotermodelle) definiert werden. Vorhandene Referenzpositionen können neu gespeichert werden, um ihren Typ zu ändern.
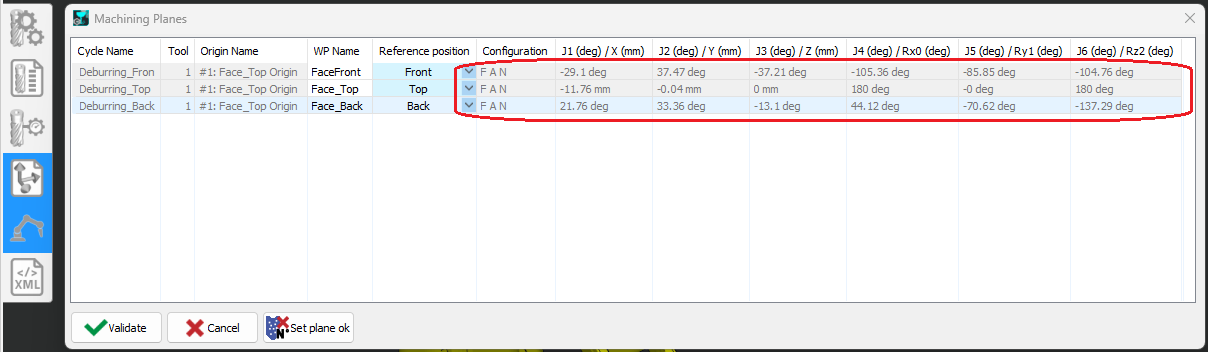
Wenn sich das Teil während der Roboterpfaderstellung bewegen kann (z. B. unter Verwendung eines zusätzlichen Positionierers), wird eine Referenzposition vom Gelenktyp empfohlen, um Mehrdeutigkeiten zu vermeiden.
Erkennung von Ellbogensingularitäten (6)
Schwellenwert für die Erkennung von Schultersingularitäten. Dieser Parameter hilft, einen Mindestabstand zur Robotersingularität sicherzustellen.
Erkennung von Ellbogensingularitäten (7)
Schwellenwert für die Erkennung von Ellbogensingularitäten. Dieser Parameter hilft, einen Mindestabstand zur Robotersingularität sicherzustellen.
Erkennung von Handgelenksingularitäten (8)
Schwellenwert für die Erkennung von Handgelenksingularitäten. Dieser Parameter hilft, einen Mindestabstand zur Robotersingularität sicherzustellen.
Simulationsbeschleunigungsfaktor (9)
Resampling-Faktor für interpolierte Punkte zur Beschleunigung der MTE-Simulation (für große Werkzeugwege). Kann die Genauigkeit der Simulation und Kollisionserkennung verringern. Kein Einfluss auf die NC-Ausgabe.
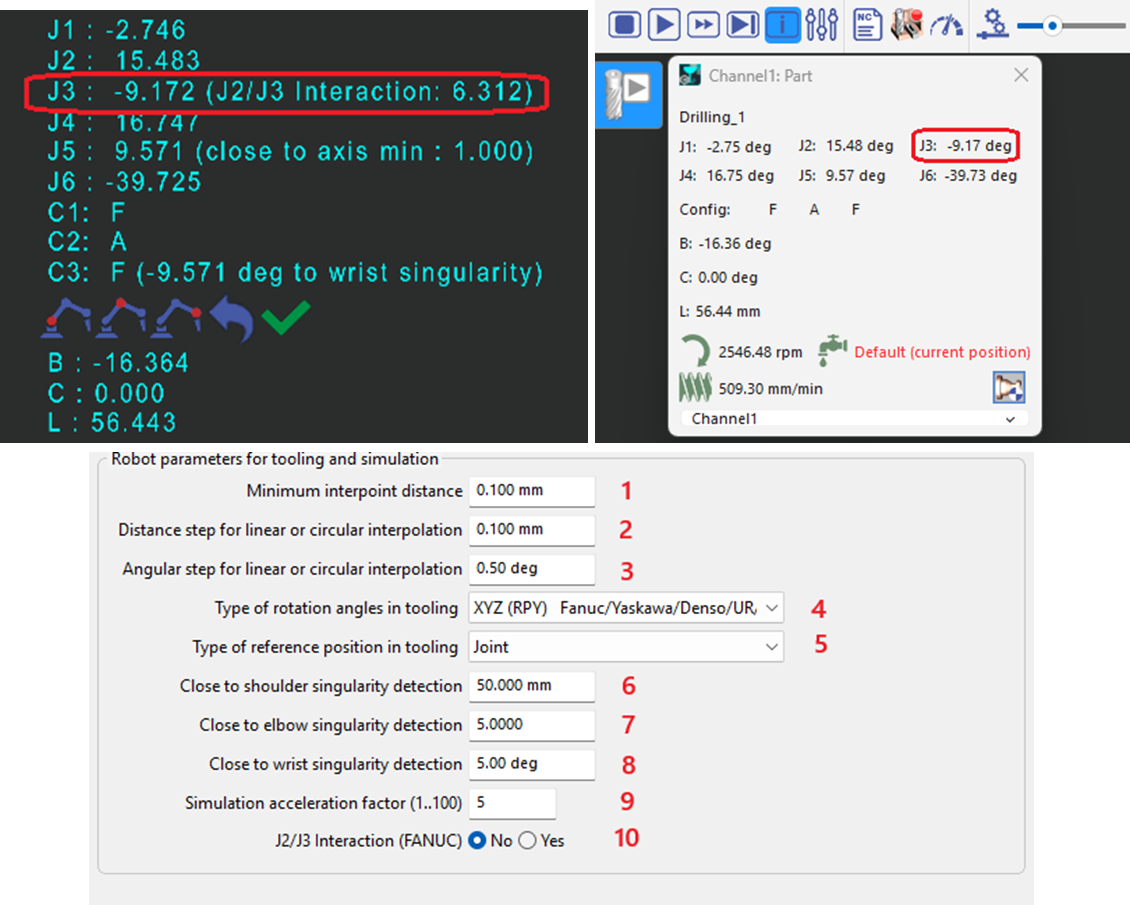
J2/J3-Interaktion (10)
Diese Option kann aktiviert werden, um den angezeigten Gelenkwinkel auf dem TP für J3 abzugleichen, wenn J2 und J3 gekoppelt sind, wie bei der Fanuc-Roboterfamilie. Diese Option gilt für die Anzeige der Roboter-Gelenkwinkelkoordinaten in der Werkzeugverwaltung und in der MTE-Simulation sowie für die Grenzwerte der Gelenkwinkel in den Maschinenparametern.