Warum Roboter?
|
Der globale CAM-Markt wächst aufgrund von Fortschritten in der Robotertechnologie, verbesserter Produktionsqualität, gesteigerter Maschineneffizienz und zunehmender Industrialisierung rasant. Roboter bieten einen 24/7-Betrieb, außergewöhnliche Wiederholgenauigkeit mit Präzision oft unter 50 Mikron und eine hohe Rentabilität (ROI) über die Zeit. Sie sind entscheidend für die Weiterentwicklung von Industrie 4.0, maschinellem Lernen und KI und treiben Innovationen voran und verbessern die Produktivität in verschiedenen Branchen. |
Offline-Roboterprogrammierung (OLP)
|
Traditionell werden Roboter über ein Teach Pendant, ein Handgerät, das den Roboter manuell durch Aufgaben führt, angelernt. Diese Methode kann umständlich, riskant und zeitaufwendig sein. Die Offline-Roboterprogrammierung (OLP) ermöglicht es Bedienern, remote mit digitalen 3D-Modellen zu arbeiten, um Roboterpfade zu generieren und zu validieren, bevor sie auf den Roboter hochgeladen werden. Dies reduziert das manuelle Anlernen, erhöht die Sicherheit und verbessert die Effizienz. Vorteile von ROP:
|

|
Technische Merkmale von GO2cam Roboter
|
GO2CAM verfügt über die gesamte Infrastruktur zur Implementierung von OLP mit einer leistungsstarken mathematischen Engine für die Berechnung der Roboterkinematik. Ziel von GO2CAM ist es, den Großteil der Schwierigkeit der Roboterprogrammierung innerhalb der Software zu halten und einen Roboter für den Kunden so einfach zu bedienen zu machen wie eine Fräsmaschine. Die ROP in GO2cam ist anwendbar: |
||
|
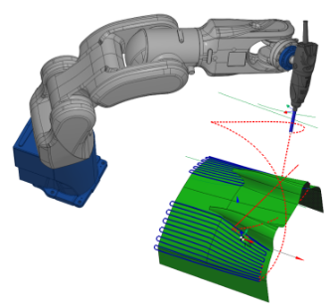
> Für Aufgaben, bei denen der Roboter einem kontinuierlichen Pfad folgen soll, ist der Arbeitsablauf fast derselbe wie bei Werkzeugmaschinen
|
|
|
|
> Für Aufgaben, bei denen der Roboter nur mehrere Wegpunkte durchfahren muss, wird eine interaktive Schnittstelle verwendet, um den gesamten Pfad zu planen
|

|
|
|
Die Software kann fast alle seriellen 6-Achs-Roboter verarbeiten: |
|
|
|
Typ 1 : Die meisten industriellen 6-Achs-Roboter, bei denen sich die letzten 3 Achsen an einem Punkt schneiden 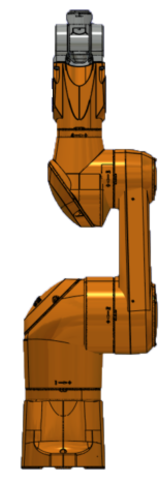
|
Typ 2 : Die meisten kollaborativen Roboter, bei denen die 2., 3. und 4. Achse parallel sind 
|
Typ 3 : Wie Typ 1, außer dass sich die letzten drei Achsen nicht an einem Punkt schneiden (Fanuc CRX) 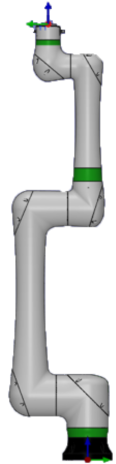
|
Die Schritte zur Programmierung von Robotern in GO2cam sind hauptsächlich folgende :
-
CAM des Teils, das für andere Roboterzellen wiederverwendet werden kann.
-
Konstruktion der Roboterzelle, die für andere Teile wiederverwendet werden kann.
-
Einstellung der Roboter-Bearbeitungsstrategie
-
Simulation und Kollisionserkennung
-
Einstellung von PP und Technofunktionen
-
Generierung des Roboterprogramms