简介
本页介绍虎钳组件矢量创建过程,以及不同定位方式的实现。
|
|
|
|
通过交互式轴系统,刀具、组件、机床等的创建过程已变得更加流畅。
|
|
创建多夹紧虎钳
|
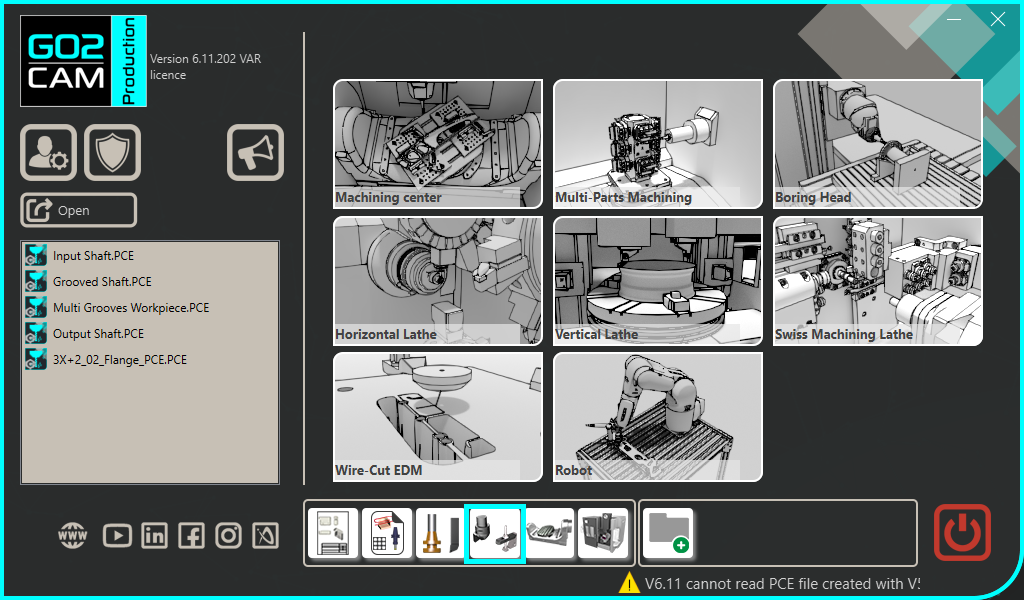
在主页中选择“夹持装置/刀架”模块。 |
|
|
点击 GO 按钮 |
|
|
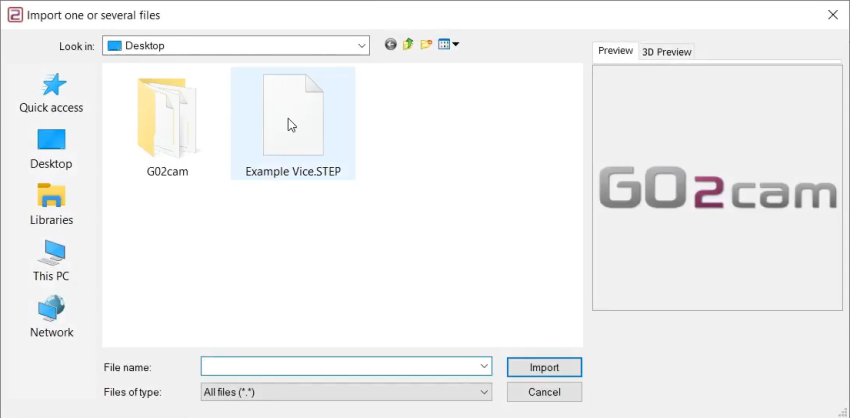
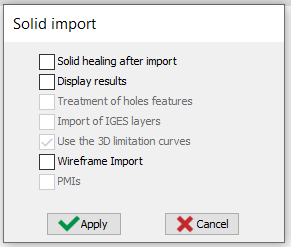
选择要导入的文件 |
|
|
选择要应用于实体的导入选项。 点击“应用” |
|
|
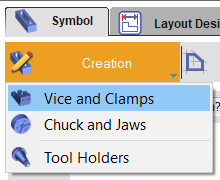
点击“创建”选项卡,然后点击“虎钳和夹具”菜单 |
|
|
点击“组件矢量”命令,创建活动组件的矢量。 |
|
|
选择将与矢量关联的活动零件。 |
|
|
选择“定向轴”命令定义轴系统的位置。 |

|
|
再次单击参考面,然后单击“绿勾”进行验证。 |
|
|
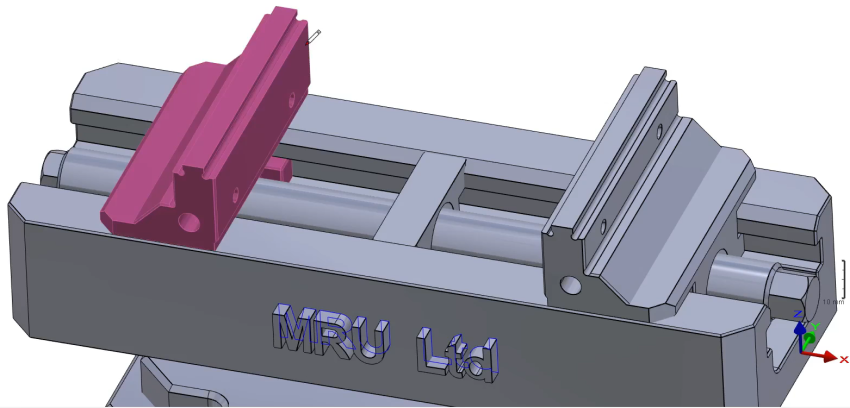
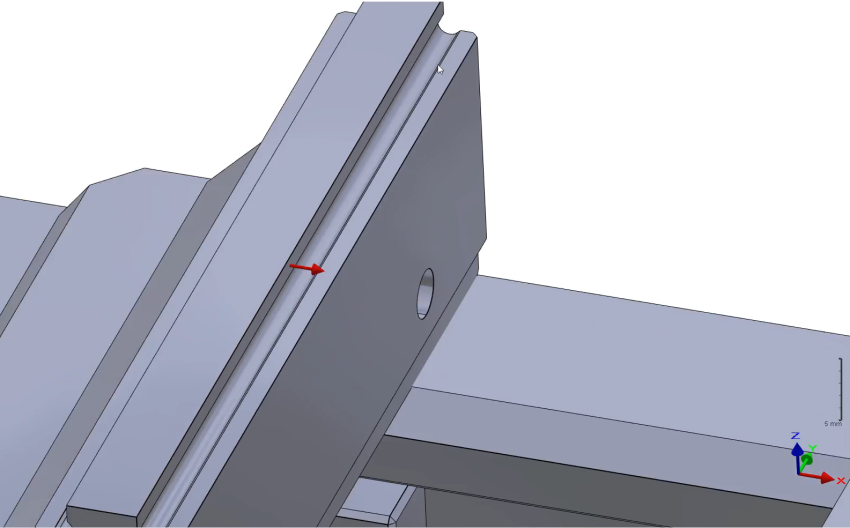
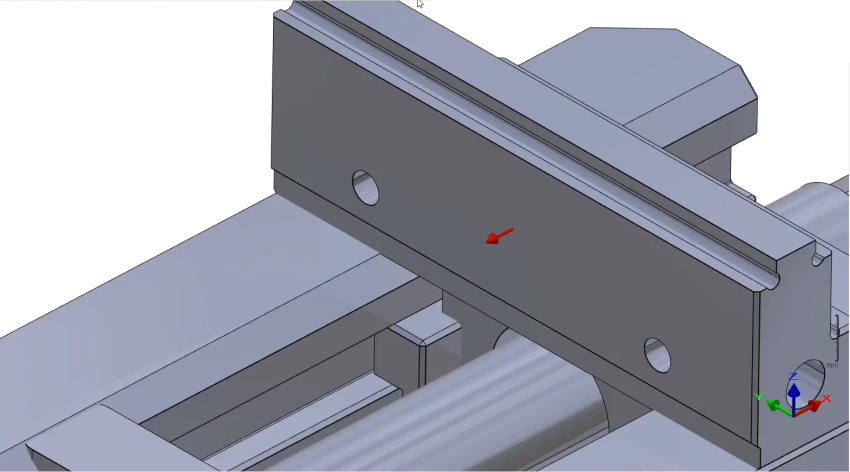
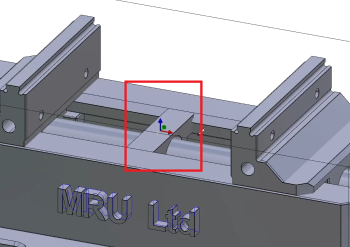
选择“组件矢量”命令 然后选择“定向轴” 并单击活动元件的面以创建如图所示的矢量。 |
|
|
重复相同步骤,在活动元件的另一侧创建如图所示的。 |
|
|
勾选“反转矢量方向”复选框以反转矢量方向。 由于这是虎钳的另一侧,请激活“反向夹紧”复选框,然后用绿勾进行验证。 |


|
|
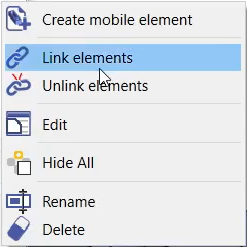
在动态组件树中,选择所有三个“活动元件”。 然后右键单击并选择“链接元素”。 |
|
|
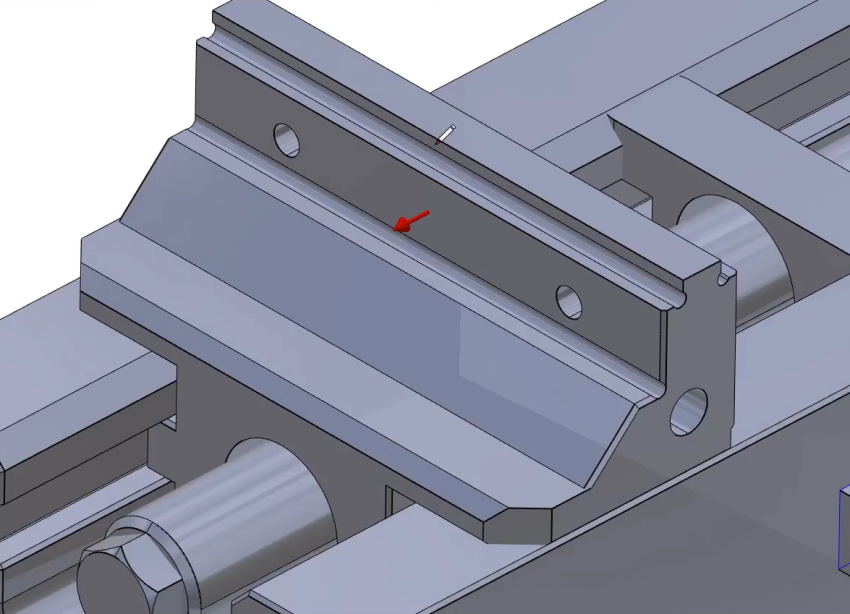
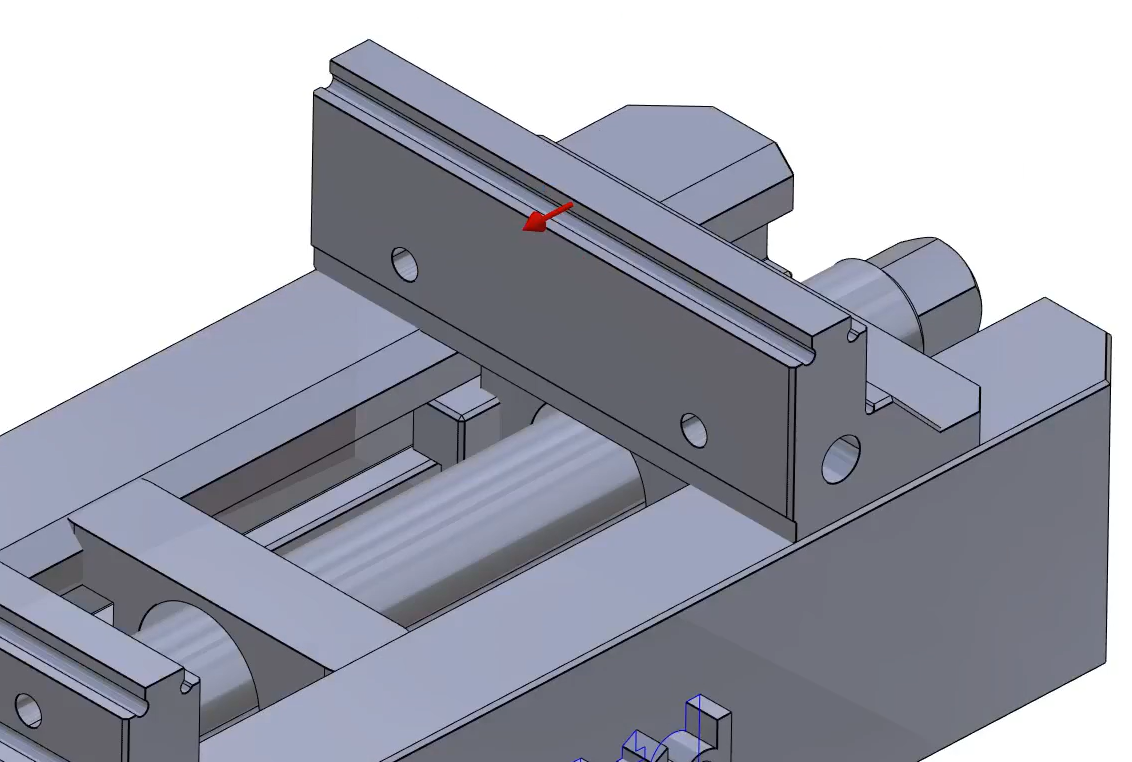
对第二个虎钳重复此过程。首先,单击“组件矢量”命令 以创建轴系统。 然后选择如图所示的活动元件。 |
|
|
选择“定向轴” 并单击活动元件的面以创建如图所示的矢量。 然后验证。
|
|
|
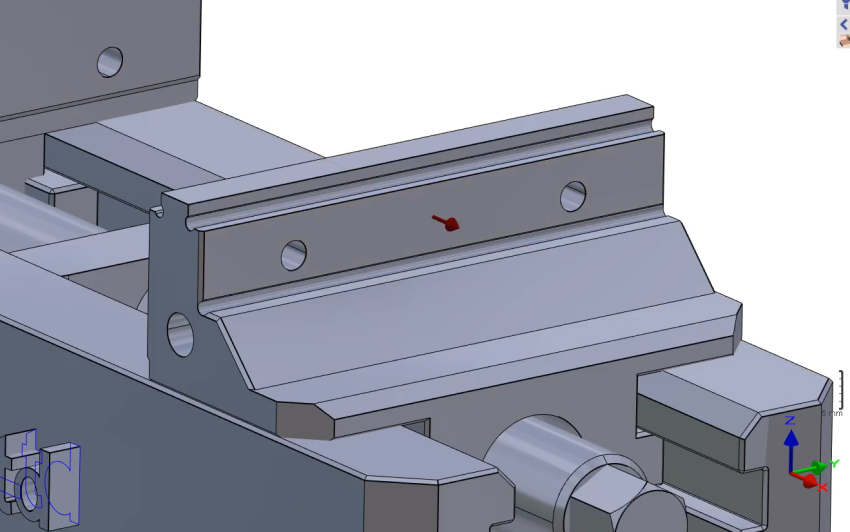
单击“组件矢量”命令 并再次选择“定向轴” 然后选择如图所示的面以创建矢量。 然后验证。 |
|
|
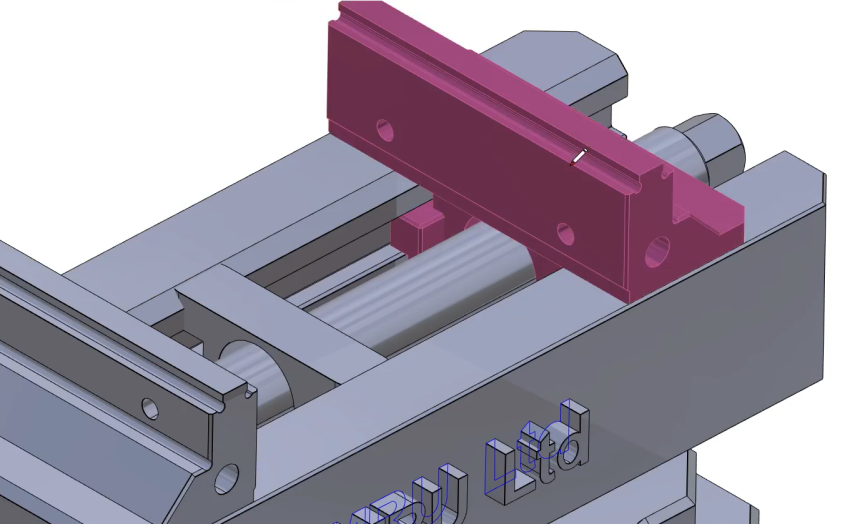
对第二个虎钳的另一侧重复此过程。 然后链接新创建的三个元素。 |
|
|
单击“创建轴系统”命令。 |
|
|
选择刀具以定义轴系统的位置 |

|
|
定义如图所示的轴系统 0。
|
|
|
重复相同过程以定义如图所示的轴系统 1。 |
|
|
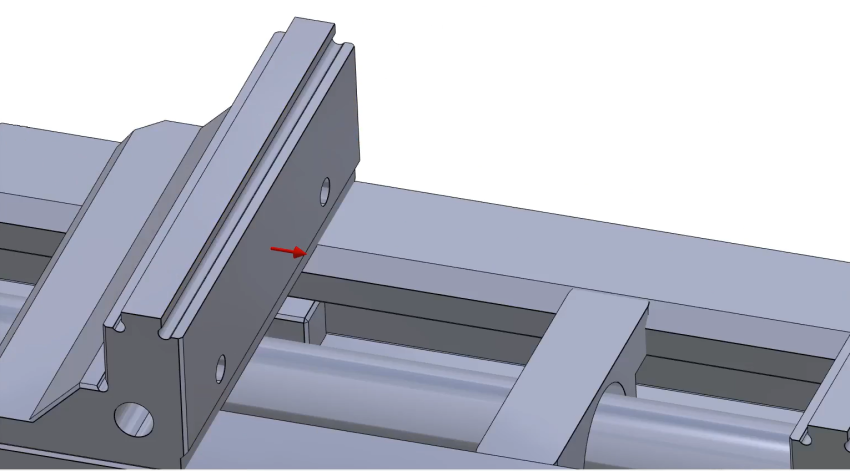
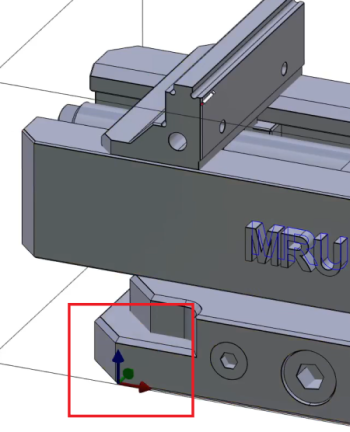
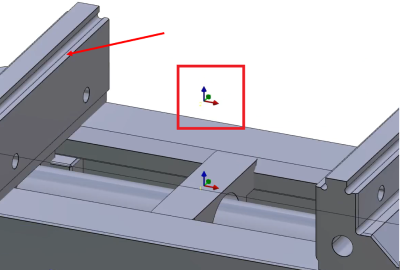
在与轴系统 1 相同的位置创建轴系统 2,但高度为 89(键入或单击箭头所示的面)。
|
|
|
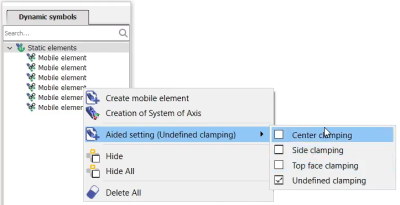
在动态组件树中,右键单击“静态元素”,然后选择“辅助设置”并勾选“中心夹紧” |
|
|
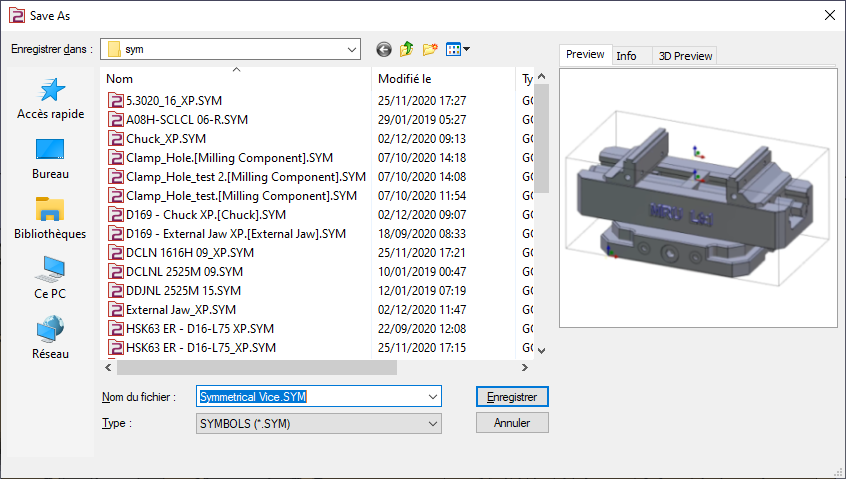
将文件保存在用户的组件文件夹中,以供 GO2cam 使用。 |
|
|
|