-
Eine Arbeitsstation umfasst normalerweise mehr Geräte (Isolationszelle, externe Achsen usw.) als nur den Roboterarm.
-
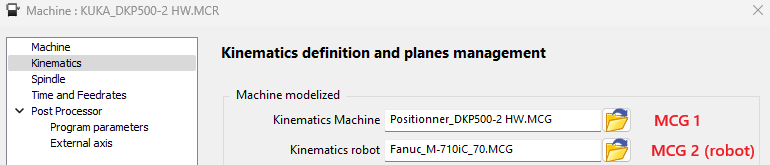
Empfohlen: verwenden 2 Maschinen (MCGs)
-
MCG 1 = Hauptmaschinen Zelle (mit Position eines externen Elements ).
-
MCG 2 = nur Roboterarm.
-
Vorteile mit 2 Maschinen:
-
Einfacher Austausch des Roboterarms unter Beibehaltung der Hauptzelle ( MCG 1 ).
-
Roboterbasis kann neu positioniert werden (Doppelklick auf die Roboterbasis im Maschinenbaum), um sie an Teil/Werkzeug anzupassen.
-
Wenn nur der Roboterarm benötigt wird
-
MCG 1 = Roboterarm.
-
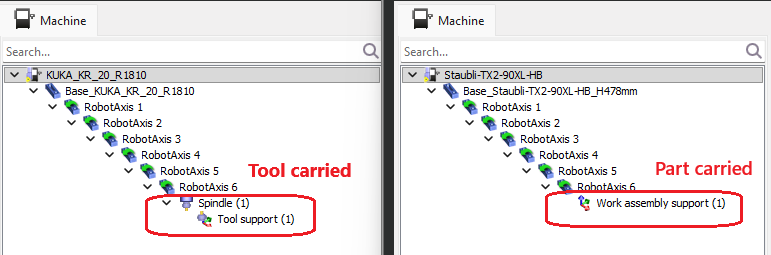
Eine Halterung, entweder für das Werkzeug oder für das Werkstück, muss immer am Roboterflansch (RobotAxis 6) angebracht sein. Die andere Halterung kann in MCG 1 oder MCG 2 definiert werden.
-
Werkzeughalterung am Roboterflansch = Werkzeuggeführt.
-
Werkstück Halterung am Roboterflansch = Teilgeführt.
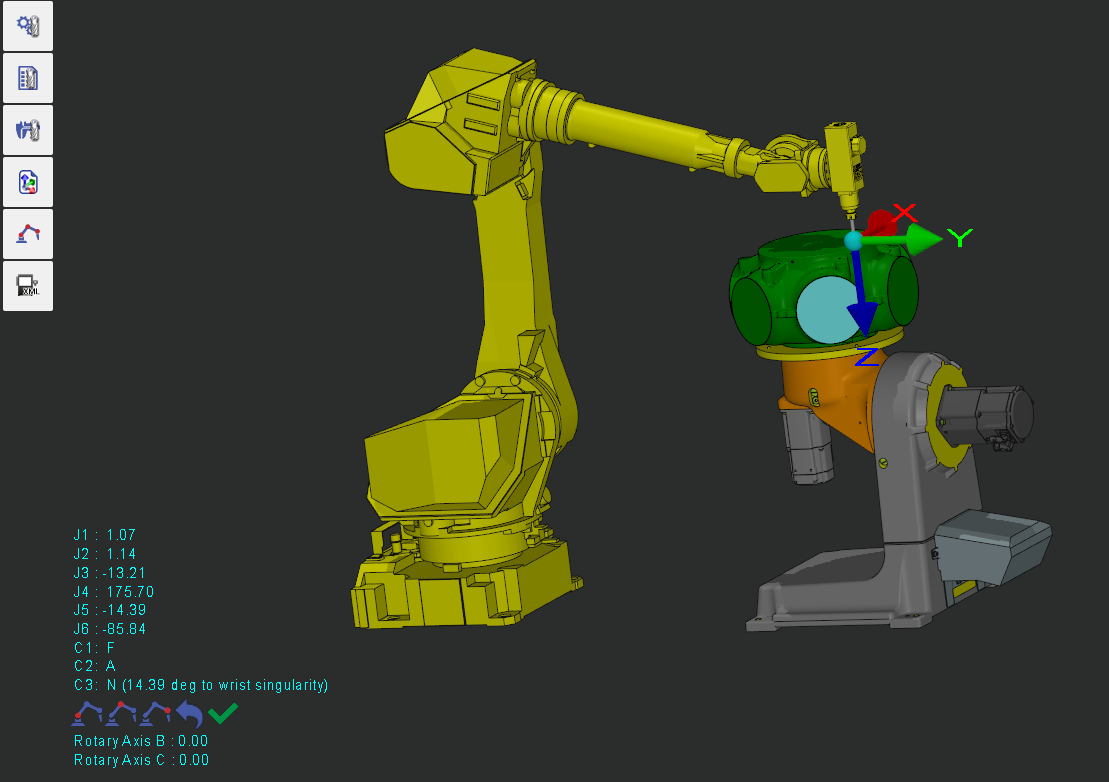
Erreichbarkeitsvorprüfung
-
In der Werkzeugverwaltung, Doppelklick auf einen beliebigen Punkt des Teils → Roboter wird zur Erreichbarkeitsvorschau automatisch dorthin positioniert.