Bu sayfa 2 bölüme ayrılmıştır.
-
İlk bölüm, bir parçanın programlanması için izlenmesi gereken bazı kuralları ve önerileri açıklar.
-
İkinci bölüm, programlama sürecini açıklar.
Kurallar ve Öneriler
|
Makineyi yükle GO2cam'de önce makinenin yüklenmesi, tercihen bir FMO ile yüklenmesi önerilir. Bu makinelerin karmaşıklığı nedeniyle, tipik olarak makine atölyelerinde, makinedeki ayarlar ve takım konumlandırması çok nadiren değiştirilecektir. Takılı olan takımın FMO'suna sahip olmak, doğru işleme çevrimlerinin tanımlanmasını sağlayacaktır. |

Modül açıldığında, ilk adım olarak tanımlanmış bir makinemiz varsa bir makine seçebileceğimiz bu pencere istenir. Makine zaten yüklenmiş olarak boş bir proje açılır. |
|
Parça konumlandırma Parçanın konumu, kullanılan makineye, kinematiklerine, mevcut işleme uzunluğuna, taret konumlarına ve yüklenen takımlara büyük ölçüde bağlıdır. Genel olarak, tornalama işlemlerinin çoğunluğu ana iş milinde yapılmalıdır. Yeniden işleme iş milinde yapılan herhangi bir dış tornalama işlemi, delik kateri ile yapılmalıdır. |
|
|
İşleme pratiği İşleme çevrimlerinin programlanması, Turnmill işlemlerinden farklı değildir. Farklılık gösterdiği yer, uygulandığı geometridir. Tornalama çevrimi (kaba/finiş) için işlem, işlenebilir parçanın tam uzunluğuna uygulanabilirken, bu Kayar Otomat tipi işleme için kaçınılmalıdır. İşleme, işlenmiş çubuğun kılavuz burç içine fazla geri çekilmesini önleyecek şekilde gerçekleştirilir.
|
|
|
Bu nedenle, işleme parçayı birkaç bölüme ayırarak yapılır. Uygulanabilecek maksimum işlemler daha sonra bölüm bölüm programlanır. GO2cam'de, Parçayı dilimle komutu, parçanın dilimlenmesine yardımcı olmak için sağlanmıştır ve bir opelist uygulandığında, işlemler her bölüm için hesaplanır. Makinede, işlemler malzeme ilerledikçe kademeli olarak gerçekleştirilir. |
|
|
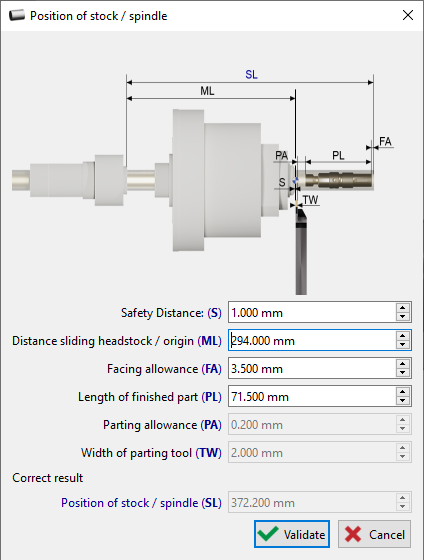
Stok/İş Mili Konumlandırma Stok konumu, işleme süreci boyunca çubuğun hareketini optimize etmek için önemlidir. Genellikle, Stok Aşımının değerinin en az sağda gösterilen SL değeri kadar olması önerilir. Mesafe değerleri otomatik olarak proje dosyasından ve makine kinematiklerinden okunur. FMO kullanmanın avantajı, kesme takımının genişliği ve toleransı otomatik olarak okunup önerilen SL değerinin önerilmesiyle burada da yansıtılır. Ana ayna konumlandırması hakkında daha fazla bilgi için, buraya tıklayın. |
|
Süreç
GO2cam'deki genel programlama süreci aşağıda açıklanmıştır:
Bir Kayar Otomat işleme merkezini programlamaya başlamak için ilk adım, belirli makine modelini seçmektir. Programlama süreci, makinenin yapılandırmasına bağlı olarak değişir. Makine dosyası bir .FMO dosyası , önceden monte edilmiş takımları ifade eder. GO2cam'de Kayar Otomat işleme için .FMO dosyalarının kullanılması önerilen uygulamadır.
Makine dosyası yüklendikten sonra, bir sonraki adım iş parçasını içe aktarmak, doğru şekilde yönlendirildiğinden emin olmaktır. Çarpışmaları önlemek ve işleme sırasında yeterli boşluk sağlamak için iş parçasının etrafında bir güvenlik alanı oluşturacağız. |
|
Dilimleme, iş parçasını daha küçük, yönetilebilir bölümlere ayırır, hassas kontrol ve verimli takım yolu üretimi sağlar. Her bölge, Z değerine göre belirlendiği gibi kademeli olarak işlenmelidir. İş parçasında dilimler oluşturmak için istenen dilim uzunluğunu belirtmemiz gerekir. Bu durumda, 25 mm dilim uzunluğu kullanacağız. Bu, iş parçasını birden çok bölgeye ayıracaktır. Bu dilimlerin konumunu, değerleri girerek veya arayüzdeki beyaz çizgiyi doğrudan hareket ettirerek manuel olarak ayarlayabiliriz. |
|
Dilimlenmiş iş parçasına bir otomatik opelist uygulamak. Opelist, işlemleri ve kesme koşullarını otomatikleştirir. |
|
|
|
MTE (Makine Takım Ekipmanı) simülasyonu, takımların etkili bir şekilde kullanılmasını sağlayarak takım yollarını, hızları ve ilerlemeleri doğrulamaya yardımcı olabilir. |
|

|
X ekseninde program operasyonları
Takım yönelimine ve parça boyutuna bağlı olarak, C ekseninde eksenel frezeleme, yalnızca parça takıma göre doğru şekilde konumlandırılmışsa mümkündür.
|
|

Özel Durum
|
Alt taretteki takımla program operasyonları Kayar Otomat Makineleri genellikle, bazı takımların alt/üst/yan taretlere monte edildiği birden fazla tarete sahiptir. Üst tarete monte edilen takımlar için, normal programlama prensipleri iyi çalışır. Bu, kötü takım yolları ve çarpışmalar oluşturabilen alt tarete monte edilen takımlar için geçerli değildir. Bir örnek videoda gösterilmiştir ve 3 çözüm tartışılmıştır: |
|
|
1/ Takım konumunu üst tarete değiştir İlk çözüm, mümkünse gerekli takımı üst tarete taşımak ve normal şekilde programlamaktır. |
|
|
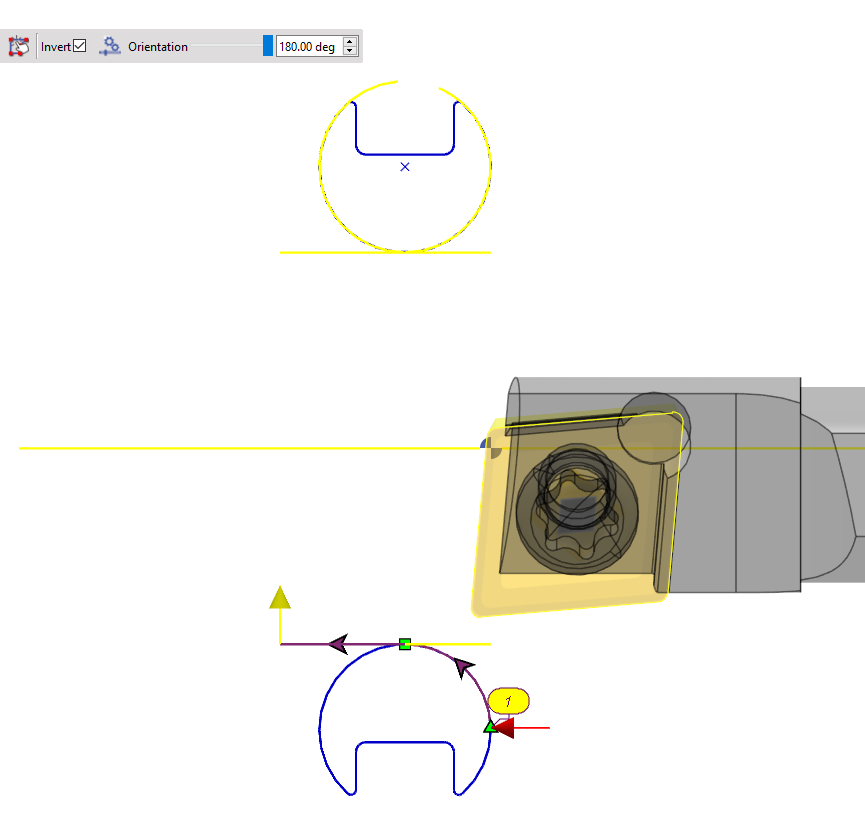
2/ Alt siluet ile programla Herhangi bir sorunu önlemek için profil seçimi için alt silueti kullanın. Ayrıca takımın yönünün ve takım çevrim tipinin buna göre değiştirildiğinden emin olun, böylece çevrim hesaplanır. |
|
|
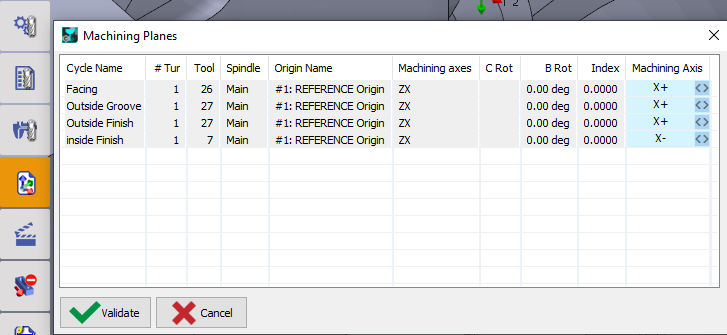
3/ MTE'de İşleme Düzlemlerini Değiştir - Takım İşleme Düzlemleri komutunda, doğru takım yollarını otomatik olarak hesaplaması için gerekli çevrimlerin işleme eksenlerini X- veya X+ olarak değiştirin.
|
|
