Es wird empfohlen, diese Anwendungsbeispiele mit einer Version auszuführen später als 6.12.209.
Sie müssen möglicherweise die Konfiguration des getragenen Werkzeugs/Teils an Ihre Anwendung anpassen. Ändern Sie dazu die Komponente, die an Roboterachse 6 angehängt ist (Umschalten zwischen Spindel → Werkzeugaufnahme und Werkstückaufnahme , oder umgekehrt). Öffnen Sie dann das Fenster DH Tabelle des Roboters , klicken Sie auf Validieren und lassen Sie die automatische Korrektur laufen.
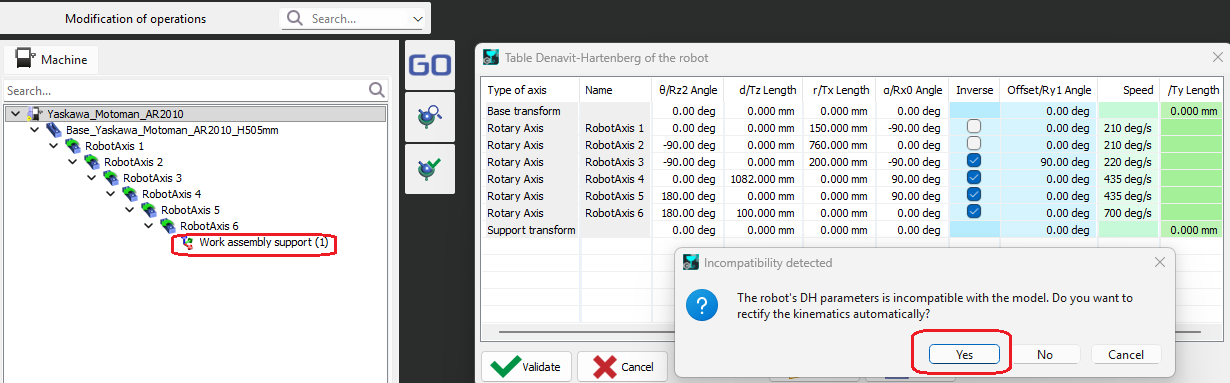
Sie müssen möglicherweise auch die Roboter-Einrichtung vervollständigen, indem Sie eine Werkzeugaufnahme hinzufügen, wenn der Roboter als Teilaufnahme konfiguriert ist, oder eine Teilaufnahme hinzufügen, wenn der Roboter als Werkzeugaufnahme konfiguriert ist.
MCG für Roboter und Cobots
|
Marke |
Modell |
Typ |
Reichweite (mm) |
Werkzeug/Teil getragen |
Verknüpfung |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Roboter |
901 |
Werkzeug getragen |
|
|
ABB |
IRB-1300-1150 |
Roboter |
1150 |
Werkzeug getragen |
|
|
ABB |
IRB_4600_40_2550 |
Roboter |
2550 |
Werkzeug getragen |
|
|
Comau |
Racer5-0_80 |
Roboter |
809 |
Werkzeug getragen |
|
|
Denso |
VS068 |
Roboter |
710 |
Werkzeug getragen |
|
|
Elite |
CS66 |
Cobot |
914 |
Teil getragen |
|
|
Elite |
CS612 |
Cobot |
1304 |
Werkzeug getragen |
|
|
Fanuc |
ARCMate_100iD |
Roboter |
1441 |
Werkzeug getragen |
|
|
Fanuc |
CR-7iA_L |
Roboter |
911 |
Werkzeug getragen |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Werkzeug getragen |
|
|
Fanuc |
LR-Mate-200iD-7L |
Roboter |
911 |
Werkzeug getragen |
|
|
Fanuc |
M20iD_25 |
Roboter |
1831 |
Werkzeug getragen |
|
|
Fanuc |
M-710iC_70 |
Roboter |
2050 |
Werkzeug getragen |
|
|
Kawasaki |
RS005L |
Roboter |
903 |
Werkzeug getragen |
|
|
Kawasaki |
RS005N |
Roboter |
705 |
Werkzeug getragen |
|
|
Kuka |
KR_6_R700 |
Roboter |
726 |
Werkzeug getragen |
|
|
Kuka |
KR_20_R1810 |
Roboter |
1810 |
Werkzeug getragen |
|
|
Nachi |
MZ07L |
Roboter |
912 |
Werkzeug getragen |
|
|
Stäubli |
TX2-40 |
Roboter |
515 |
Werkzeug getragen |
|
|
Stäubli |
TX2-60 |
Roboter |
670 |
Werkzeug getragen |
|
|
Stäubli |
TX-90 |
Roboter |
1000 |
Werkzeug getragen |
|
|
Stäubli |
TX2-90L |
Roboter |
1200 |
Werkzeug getragen |
|
|
Stäubli |
TX2-90XL |
Roboter |
1450 |
Teil gehalten |
|
|
Stäubli |
TX2-200 |
Roboter |
2000 |
Teil gehalten |
|
|
STEP |
SD7-900 |
Roboter |
912 |
Werkzeug getragen |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
Werkzeug getragen |
|
|
Yaskawa |
Motoman_AR2010 |
Roboter |
2010 |
Werkzeug getragen |
|
|
Yaskawa |
Motoman_GP8 |
Roboter |
727 |
Werkzeug getragen |
|
|
Yaskawa |
Motoman_GP225 |
Roboter |
3935 |
Werkzeug getragen |
|
|
Turin |
TR03-610B |
Roboter |
616 |
Werkzeug getragen |
MCG von Positionierern
|
Marke |
Modell |
Achsen |
Verknüpfung |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|